サイリスタDC/DCコンバータ
 サイリスタ DC / DC コンバータ (DC) は、出力パラメータ (電流と電圧) の所定の法則に従って調整され、交流を直流に変換するデバイスです。サイリスタ コンバータは、モータの電機子回路とその界磁巻線に電力を供給するように設計されています。
サイリスタ DC / DC コンバータ (DC) は、出力パラメータ (電流と電圧) の所定の法則に従って調整され、交流を直流に変換するデバイスです。サイリスタ コンバータは、モータの電機子回路とその界磁巻線に電力を供給するように設計されています。
サイリスタ コンバータは、次の基本ユニットで構成されます。
• AC 側の変圧器または限流リアクトル、
• 整流器ブロック、
• 平滑化リアクター、
• 制御、保護、信号システムの要素。
変圧器はコンバータの入力電圧と出力電圧を一致させ、(電流制限リアクトルと同様に)入力回路の短絡電流を制限します。平滑リアクトルは、整流された電圧と電流のリップルを平滑化するように設計されています。負荷インダクタンスがリップルを特定の制限内に制限するのに十分な場合、リアクトルは提供されません。
サイリスタ DC-DC コンバータを使用すると、ロータリー コンバータを使用した場合とほぼ同じ電気駆動特性を実現できます。 発電機・電動機システム (D — D)、つまり、エンジンの速度とトルクを広い範囲で調整し、始動、停止、後進などの際に特別な機械的特性と望ましい過渡特性を得ることができます。
ただし、回転式静的コンバータと比較すると、静的コンバータには多くの既知の利点があるため、クレーン電気駆動装置の新規開発では静的コンバータが好まれます。サイリスタ DC-DC コンバータは、50 ~ 100 kW を超える電力を持つクレーン機構や、静的モードおよび動的モードでドライブの特殊な特性を得る必要がある機構の電気駆動装置での使用に最も有望です。
整流方式、コンバータの電源回路の構成原理
サイリスタコンバータは単相と多相で作られています 修正回路… 基本的な整流方式にはいくつかの設計比率があります。これらのスキームの 1 つを図に示します。 1、a.制御角 α を変化させることによって生成される電圧 Va と電流 Ia を調整します。たとえば、図 1 の b ~ e には、能動誘導負荷を備えた三相ゼロ整流回路における電流と電圧の変化の性質が示されています。
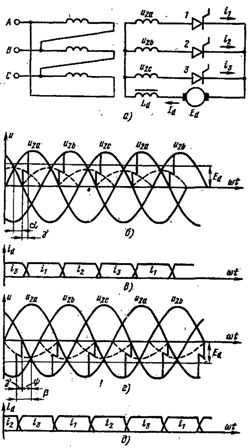
米。 1. 三相中性点回路 (a) と、整流モード (b、c) およびインバータモード (d、e) での電流と電圧の変化の図。
図に示されている角度 γ (スイッチング角度) は、電流が 2 つのサイリスタを同時に流れる時間を特徴づけます。調整電圧Δの平均値の調整角度αに対する依存性を制御特性といいます。
中性回路の場合、平均整流電圧は次の式で求められます。
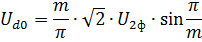
ここで、m - 変圧器の二次巻線の相数。 U2f は、変圧器の二次巻線の相電圧の実効値です。
ブリッジ回路の場合、これらの回路は 2 つのゼロ回路の直列接続と同等であるため、Udo は 2 倍になります。
単相補正回路は、原則として、モータの独立した励磁巻線の回路や、低出力モータ (最大 10 ~ 15 kW) の電機子回路など、比較的大きな誘導抵抗を持つ回路に使用されます。多相回路は主に、出力 15 ~ 20 kW を超えるモーターの電機子回路の鋳造に使用され、界磁巻線への電力供給にはあまり使用されません。単相整流回路と比較して、多相整流回路には多くの利点があります。主なものは、整流された電圧と電流の脈動の低減、変圧器とサイリスタのより適切な使用、電源ネットワークの位相の対称負荷です。
電力が 20 kW を超えるクレーン駆動用のサイリスタ DC-DC コンバータでは、 三相ブリッジ回路…これは、変圧器とサイリスタの適切な使用、整流された電圧と電流のリップル レベルの低さ、変圧器の回路と設計の単純さによるものです。三相ブリッジ回路のよく知られた利点は、変圧器接続ではなく、変圧器の寸法よりも大幅に小さい限流リアクトルを使用して接続できることです。
三相中性点回路では、磁束の一定成分が存在するため、一般的に使用される接続グループD / DおよびΔ / Yで変圧器を使用する条件は悪化します。これにより、磁気回路の断面積が増加し、それに応じてトランスの設計能力も増加します。磁束の一定成分を除去するために、変圧器の二次巻線のジグザグ接続が使用され、これにより設計電力も若干増加します。整流された電圧のレベル、リップルの増加と、上記の欠点により、三相中性点回路の使用が制限されます。
6 相リアクトル回路は、低電圧および大電流に使用する場合に推奨されます。これは、この回路では負荷電流が 3 相ブリッジ回路のように 2 つのダイオードを直列に流れるのではなく並列に流れるためです。この回路の欠点は、補正定格電力の約 70% の標準電力を持つ平滑リアクトルが存在することです。さらに、6 相回路ではかなり複雑な変圧器設計が使用されています。
サイリスタに基づく整流回路は、整流とインバータの 2 つのモードで動作します。インバータモードで動作する場合、負荷回路からのエネルギーは電源ネットワークに、つまり整流器モードとは逆方向に転送されるため、反転時には電流とeが増加します。等c. 変圧器の巻線は反対向きであり、まっすぐにするとそれに応じて向きます。反転モードの電流源は e です。等c. インバータ電圧を超える必要がある負荷 (DC マシン、インダクタンス)。
サイリスタ コンバータを整流モードからインバータ モードに移行するには、e の極性を変更します。等c. 誘導負荷で負荷と角度 α を π / 2 より大きくする。
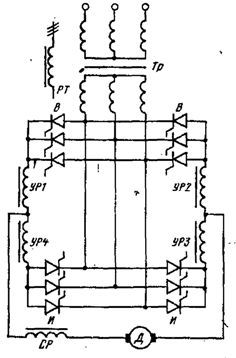
米。 2. バルブのグループをオンにするための逆並列回路。 UR1 — UR4 — レベリングリアクター。 RT — 限流リアクトル。 CP — 平滑リアクター。
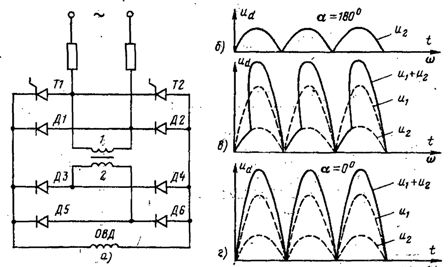
米。 3. モーターの励磁巻線回路の不可逆 TP のスキーム。反転モードを確実にするには、次に閉じるサイリスタに負の電圧がかかっている間、つまり角度 φ (図 1、c) の間、サイリスタが遮断特性を回復する時間が必要です。
これが起こらない場合、順方向電圧が印加されると、閉路サイリスタが再び開く可能性があります。これにより、インバータが転倒し、緊急電流が発生します。等c. 直流機と変圧器の方向が一致していること。ロールオーバーを避けるためには条件が必要です
ここで、δ - サイリスタのロック特性が回復する角度。 β = π — α インバータの進角です。
サイリスタ コンバータの電源回路は、モータの電機子回路に電力を供給することを目的としており、非可逆バージョン (サイリスタの 1 つの整流器グループ) と可逆バージョン (2 つの整流器グループ) の両方で作られています。サイリスタコンバータの不可逆バージョンは一方向の導通を提供し、モータトルクの一方向のみでモータおよび発電機モードでの動作を可能にします。
モーメントの方向を変えるには、界磁磁束の方向を一定にして電機子電流の方向を変えるか、電機子電流の方向を維持したまま界磁磁束の方向を変える必要がある。
反転サイリスタコンバータには数種類の電源回路図があります。最も一般的なのは、2 つのグループのバルブを変圧器の 1 つの二次巻線に逆並列接続する方式です (図 2)。このような方式は、RT リアクトルのアノード電流制限器を介して共通の交流ネットワークからサイリスタ グループに電力を供給することにより、別個の変圧器なしで実装できます。リアクトル バージョンへの移行により、サイリスタ コンバータのサイズが大幅に縮小され、コストが削減されます。
モーター分野の巻線回路用のサイリスタコンバータは、主に不可逆構造で作られています。図では。図3aは、使用される整流器スイッチング回路の1つを示す。この回路により、モーターの励磁電流を広範囲に変化させることができます。電流の最小値はサイリスタ T1 と T2 が閉じているときに発生し、最大値はサイリスタが開いているときに発生します。図では。図 3、b、d は、サイリスタのこれら 2 つの状態に対する整流電圧の変化の性質を示しています。 3、状態に応じて
反転サイリスタコンバータの制御方式
反転サイリスタ コンバータでは、バルブ グループを制御する主な方法が 2 つあります - ジョイントと個別です。一方、共同管理は一貫して行われる場合もあれば、一貫性がない場合もあります。
協調制御でパルスを発射 サイリスタ 2 つのグループの補正電圧の平均値が互いに等しくなるように、2 つのグループのバルブに適用されます。これは条件付きで提供されます

ここで、 av と ai — 整流器とインバーターのグループの調整角度。制御が不安定な場合、インバータ群の平均電圧が整流器群の電圧を超えます。これは次の条件で達成されます。

共同制御によるグループ電圧の瞬時値は常に互いに等しいわけではありません。その結果、サイリスタ グループと変圧器巻線によって形成される閉ループ (または回路) 内で、どの均等化リアクトルを制限するために均等化電流が流れます。 UR1 ~ UR4 はサイリスタコンバータに含まれています (図 1 を参照)。
リアクトルはグループごとに 1 つまたは 2 つずつ均等化電流ループに接続され、均等化電流が定格負荷電流の 10% を超えないようにそのインダクタンスが選択されます。電流制限リアクトル (グループごとに 2 つ) がオンになると、負荷電流が流れると飽和します。たとえば、グループ B の動作中、リアクトル UR1 と UR2 は飽和しますが、リアクトル URZ と UR4 は飽和していないため、均等化電流が制限されます。グループごとに 1 つずつリアクター (UR1 および URZ) がオンになっている場合、ペイロードが流れているときにリアクターは飽和しません。
一貫性のない制御を備えたコンバーターは、調整された制御を備えたコンバーターよりもリアクターのサイズが小さくなります。しかし、制御が一貫していない場合、許容制御角度の範囲が狭くなり、変圧器の使用が悪化したり、設備の力率が低下したりすると同時に、電気機器の制御の直線性や速度特性が低下します。ドライブが違反されています。均等化電流を完全に排除するために、バルブのグループを個別に制御します。
個別の制御は、制御パルスがその時点で動作しているはずのグループにのみ適用されるという事実から構成されます。アイドルグループのバルブには制御パルスは供給されません。サイリスタコンバータの動作モードを変更するには、特殊なスイッチングデバイスが使用されます。このスイッチングデバイスは、サイリスタコンバータの電流がゼロのときに、最初に前のワーキンググループから制御パルスを削除し、その後、短い一時停止(5- 10 ms)、他のグループに制御パルスを送信します。
個別制御により、個別のバルブグループの回路に均等化リアクトルを含める必要がなく、変圧器をフルに使用でき、インバータモードでのサイリスタコンバータの動作時間の減少によるインバータの転倒の可能性が低くなります。均等化電流が存在しないため、エネルギー損失が減少し、それに応じて電気駆動装置の効率が向上します。ただし、個別の制御では、制御パルスをブロックするためのデバイスの信頼性が高く要求されます。
遮断装置の動作の誤動作や、動作していないサイリスタグループに制御パルスが現れると、サイリスタコンバータの内部短絡が発生します。これは、この場合のグループ間の均等化電流が変圧器のリアクタンスによってのみ制限されるためです。巻線が大きくなり、許容できない大きな値に達します。