誘導電動機の巻線相の開始と終了を決定する方法
 線間電圧と電気モーターの固定子巻線の図
線間電圧と電気モーターの固定子巻線の図
たとえば、電気モーターのパスポートが 220/380 V を示している場合、これは電気モーターが 220 V ネットワーク (巻線図 - 三角形) と 380 V ネットワーク (コイル接続図 - 星形) の両方に接続できることを意味します。 。誘導電動機の固定子巻線には 6 つの端があります。
GOST によれば、非同期モーターの巻線には次の指定があります。I 相 — C1 (開始)、C4 (終了)、II 相 — C2 (開始)、C5 (終了)、III 相 — C3 (開始)、C6 (終わり)。
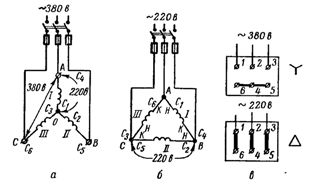
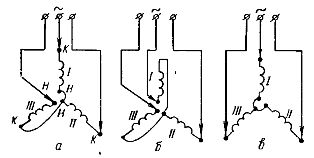
米。 1. 非同期モーターの巻線の接続方式: a - 星形、b - 三角形、c - 端子台上の「スター」および「デルタ」方式の実装。
主電源電圧が 380 V の場合、モーターの固定子巻線はスター結線する必要があります。同時に、すべての始まり (C1、C2、C3) またはすべての終わり (C4、C5、C6) が共通点に集まります。巻線AB、BC、CAの両端間には380Vの電圧が印加される。各相、つまり点 O と A、O と B、O と C の間の電圧は √Z 倍少なくなります: 380 / √Z = 220 V。

 電気モーターの接続方法
電気モーターの接続方法
電圧が 220 V の場合 (220/127 V 電圧システムでは、現時点では実際にはどこにもありません)、モーターの固定子巻線はデルタ接続する必要があります。
点A、B、Cでは、前の巻線の始点(H)が次の巻線の終点(K)とネットワークの相に接続されます(図1、b)。 I 相が点 A と B の間、点 B と C の間の II、および点 C と A の間の III 相に含まれると仮定すると、「デルタ」方式で接続されます。最初の I (C1) と、終了 III (C6)、開始 II (C2) と終了 I (C4)、開始 III (C3) と終了 II (C5)。
一部のモーターでは、巻線相の端が端子台に引き出されています。 GOSTによると、巻線の始まりと終わりは、図1のcに示す順序で引き出されます。
「スター」スキームに従ってモーターの巻線を接続する必要がある場合、端(または始まり)が引き出される端子が短絡され、ネットワークの相がモーターに接続されます。始まり(または終わり)が持ち出される端末。
モーターの巻線を「デルタ」に接続する場合、クランプはペアで垂直に接続され、主電源相はジャンパーに接続されます。垂直ジャンパは、開始 Iz から終了 III フェーズ、開始 II から終了 Iz フェーズ、開始 III から終了フェーズ II を接続します。
巻線の接続方式を決定するときは、次の表を使用できます。
電気モーターのパスポートに記載されている電圧、V
主電源電圧、V
127 220 380 127 / 220 三角星 — 220 / 380 — 三角星 380 / — — — 三角
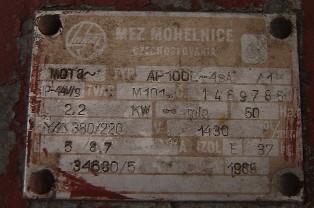
電動モーターパスポート
固定子巻線の相の一致端子 (最初と最後) を決定します。
モーターの固定子巻線の端子には、通常、金属ラグの標準マークが付いています。ただし、これらのヒントは失われます。次に、合意された結論を特定することが必要になります。これは次の順序で行われます。
まず、テストランプを使用して、個々の相巻線に属するワイヤのペアを決定します(図2)。
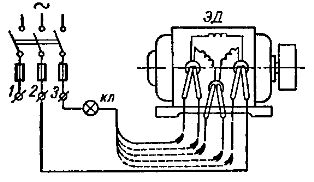
米。 2. テストランプを使用した相巻線の測定。
モーターの固定子巻線の 6 つの端子のうちの 1 つは主電源端子 2 に接続され、テスト ランプの一端は主電源 3 のもう一方の端子に接続されます。テスト ランプの他端で他の 5 つの端子のそれぞれに触れます。ランプが点灯するまで、ステータ巻線を順番に動かします。ランプが点灯する場合、ネットワークに接続されている 2 つの出力は同じ位相に属しています。
同時に、コイルケーブルをショートさせないように注意する必要があります。ピンの各ペアにはマークが付けられます(結び目を作るなど)。
固定子巻線の位相を決定したら、作業の 2 番目の部分に進み、合意された結論、つまり「開始」と「終了」を決定します。この作業は 2 つの方法で実行できます。
1. 変換方法。フェーズの 1 つでテスト ランプがオンになります。他の 2 つの相は直列に接続されており、主電源を構成します。 相電圧.
これら 2 つのフェーズが、一方のフェーズの条件付き「終了」が点 O (図 3、a) でもう一方のフェーズの条件付き「開始」にも接続されるように含まれていることが判明した場合 (図 3、a)、磁気メモは∑ Ф は 3 番目のコイルを横切り、その中に EMF を誘導します。
ランプはわずかな光で EMF の存在を示します。グローが目に見えない場合は、最大 30 ~ 60 V の目盛りが付いた電圧計をインジケータとして使用する必要があります。
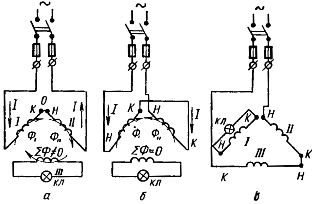
米。 3. 変換方法によるモーターの相巻線の開始と終了の決定
たとえば、コイルの条件付き「端」が点 O (図 3、b) で出会う場合、コイルの磁束は互いに反対の方向を向きます。全光束はゼロに近くなり、ランプは点灯しません(電圧計の表示は O になります)。この場合、いずれかのフェーズに属する結論をキャンセルして、再度有効にする必要があります。
ランプが点灯した場合 (または電圧計が電圧を示した場合)、端に印を付ける必要があります。共通点 O で一致した結論の 1 つに対して、H1 (I フェーズの開始) とマークされたラベルを付け、もう 1 つの出力 - K3 (または K2) にラベルを付けます。
ラベル K1 および H3 (または H2) は、それぞれ H1 および K3 と共通のノード (作業の最初の部分で結びついている) にある結論に配置されます。
3 番目の巻線の一致した結論を決定するには、図 3 に示す回路を使用します。ランプは、端子がすでに示されているフェーズの 1 つでオンになります。
2. 位相選択方法。固定子巻線の相の一致する端子 (開始と終了) を決定するこの方法は、最大 3 ~ 5 kW の低出力モーターに使用できます。
米。 4. «スター»回路を選択して、巻線の«始まり»と«終わり»を決定します。
個々の相の端子が決定されると、それらはランダムにスター型に接続され (相の 1 つの端子が主電源に接続され、一度に 1 つの端子が共通点に接続されます)、モーターが主電源に接続されます。すべての条件付き「開始」またはすべての「終了」が共通点に達すると、エンジンは正常に動作します。
しかし、位相(III)の1つが「逆転」していることが判明した場合(図4、a)、モーターは回転できますが(ただし、簡単に停止できます)、モーターが大きくうなり音を立てます。この場合、巻線の 1 つ (たとえば、I) の結論をランダムに交換する必要があります (図 4、b)。
モーターが再びハム音を立ててうまく動作しない場合は、以前と同様に(スキームaと同様)フェーズを再度オンにする必要がありますが、別のフェーズIIIをオンにします(図3、c)。
この後にモーターがうなる場合は、この位相も以前と同様に設定し、次の位相を反転する必要があります。 II.
エンジンが正常に動作し始めると(図 4、c)、共通点に接続されている 3 本のワイヤすべてに同じ方法でマークを付ける必要があります。たとえば、「端」と反対側のワイヤ - 「始まり」をマークする必要があります。その後、エンジンパスポートに示されている作業図を組み立てることができます。
