セットアップおよび運転中の誘導モーターの滑りを判断する方法
エンジン回転数が大きく異なる場合 同期的に、電気モーターのシャフトに直接接続されたタコメーターまたはタコジェネレーターで測定され、モーターの滑りは式 S = (n1 — n2) / n1 によって決定されます。ここで、n1 = 60f / p — 同期回転周波数。 n2 は実際の速度です。
電気モーターの滑りを測定するこの方法の利点は、測定速度と、定速と可変速の両方を実行できることです。この測定方法の欠点としては、従来のタコメーターの精度が低いこと (誤差 1 ~ 8%)、校正が難しいことが挙げられます。さらに、タコメータ機構の摩擦損失が顕著な負荷となるため、低出力電気モータのテストにはタコメータを使用できません。
さまざまな測定を行うために、手持ち式タコメーターには通常、さまざまな形状や目的の交換可能なチップのセットが付属しており、ローラーの端に配置されます (図 1)。これらのチップの中で最も広く使用されているのは、金属カートリッジに取り付けられたゴム製コーンです。これらの先端はすべて、電気機械のシャフトの端にある尖った凹部に接触するために使用されます。高周波にはゴム製のセンターチップが使用され、低〜中周波にはスチール製のチップが使用されます。
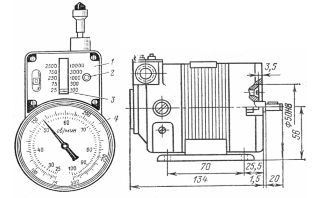 米。 1. IO -10 型の遠心タコメーターとタコジェネレーターの全体図: 1 - スケール。 2 - スイッチボタン。 3 — 限界インジケーター。 4 — ダイヤル
米。 1. IO -10 型の遠心タコメーターとタコジェネレーターの全体図: 1 - スケール。 2 - スイッチボタン。 3 — 限界インジケーター。 4 — ダイヤル
シャフトの中心に空洞がある場合は、タコメーターシャフトとエクステンションの対応する先端に配置されるエクステンションが使用されます。芯がない場合や芯が足りない場合は、ローラーを使用し、側面(ゴムリング)から回転軸の表面に押し付けます。
測定条件に応じて、フィクスチャ(拡張チップ)を選択してください。測定を開始する前に、溝の中心またはシャフトの表面に付着した油分、ゴミ、ゴミを取り除いてください。
電気モーターの回転速度を測定するには、まずタコメーターの必要な測定限界を設定する必要があります。周波数測定の順序が不明な場合は、タコメータの損傷を避けるために、最高値から測定を開始する必要があります。
測定は、タコメータの軸と被測定軸の軸が一致するように、タコメータの先端を回転軸に軽く押し当て、短時間(3 ~ 5 秒)行ってください。ローラーを使用して、ローラーと平行にします。

滑りが 5% を超えない場合は、ネオンランプを使用したストロボ法で速度を測定できます。
モーターシャフトの端にチョークで直径方向の線を描きます。エンジンの稼働中は、エンジンと同じ周波数のネットワークから電力を供給されるネオン ランプによって点灯します。観察者には、シャフトの端に線ではなく、シャフトの回転方向に逆らってゆっくりと回転する星が見えます。星の光線の数はモーターの極数とネオンランプの位置によって決まります。ランプの両方の電極からの光がシャフトの端に当たる場合、見える星の光線の数は 2p、チョーク線のあるシャフトの端が一方の電極だけで照らされる場合、見える星の光線の数は 2p です。目に見える星は極の数に等しい。
ストップウォッチで計測した時間 t (通常 30 秒) の間に、垂直位置を通過する目に見える星 m の光線の数が数えられます。見える星の光線の数は2pなので、滑ります
ここで、f1 はネオンランプの供給ネットワークの周波数です。
f1 = 50 Hzの場合。
ストロボスコープ法の別の変形は次のとおりです。ディスクの 1 つは前側からモーターシャフトに固定されています (図 2)。チェーンを組み立てます (図 3)。バイポーラ マシンでは、2p = 2 とラベル付けされたディスクがシャフトに固定され、パッチ電極を備えたネオン ランプで照明されます。

米。 2…誘導電動機の極数によるストロボディスクのイメージ
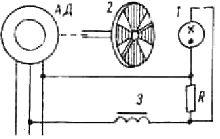
米。 3… スリップ検出のストロボスコープ方式用のネオンランプスイッチングスキーム: 1 — ネオンランプ、2 — ストロボスコープディスク、3 — 誘導コイル
ローターは非同期で回転し、磁場よりも遅れるため、ディスクはローターの回転とは逆方向にゆっくりと回転しているように見えます。時間 t m の間に黒いセクターが静止点 (ベアリングに固定された矢印) を通過する場合、スリップ値は次の式で求められます。
固定点を通過するセクターのカウントは、ストップウォッチが開始した瞬間からではなく、次のマークの交差点から開始する必要があります。
鮮明な画像を得るには、ランプに電圧を印加する必要があります。その曲線を図に示します。 4… ランプは、その端子の電圧が点火閾値と呼ばれる値に達すると点灯します。
米。 4... ネオンランプを点灯して鋭い電圧の波形を取得するための回路図: 1 — ネオンランプ; 2 — 誘導抵抗 X を持つ高飽和磁気回路を備えたリアクティブ コイル (抵抗 R と X での電圧降下はほぼ同じです)
誘導コイルを使用したモーターの滑りの測定。この方法は、回転子 Fr (図 5) の分散磁束の回転周波数を監視することに基づいており、この分散磁束は滑りに比例した周波数で誘導コイルの巻線を横切ります。
米。 5. 誘導コイルを使用した非同期電動機の回転子滑り測定方式
高感度のミリボルトメーター (目盛りの中央にゼロが付いていることが望ましい) がコイルの端子に接続されています。コイルはローターシャフトの端にあります。コイルをさまざまな方向に回転させることで、機器の矢印の最大振動が観察される位置を見つけます。時刻 t における完全振動数 k から、スリップ値が計算されます。

f = 50 Hzの場合。

計算するには、50 回の完全な振動を数え、ストップウォッチを使用して時間を記録すると便利です。それから: 。
誘導コイルとして、10〜20,000巻のリレーコイルまたはDCコンタクタを使用できます(または少なくとも3,000巻のコイルを巻きます)。磁束を増やすために、いくつかの変圧器鋼のストリップで作られたコアがコイルに挿入されます。誘導コイル方式は非常にシンプルで、あらゆる種類の機械に適しています。
巻線ロータを備えた非同期モータでは、上記の方法に加えて、ロータ相の 1 つに接続された電磁電流計を使用して滑りを測定できます。また、ロータ回路に非スイッチング抵抗が存在する場合は、接続された電圧計を使用して滑りを測定できます。ローターリングに。両面スケール付きの器具を使用することをお勧めします。誘導電動機のすべりは、誘導コイル方式と同様に装置針の完全振動数から計算されます。
