発電機システム — DC モーター
 さまざまな工作機械では、磁束の調整では実現できない広範囲にわたる駆動速度の無段階制御が必要となることがよくあります。 並列励磁の DC モーター… このような場合には、より複雑な電気駆動システムが使用されます。
さまざまな工作機械では、磁束の調整では実現できない広範囲にわたる駆動速度の無段階制御が必要となることがよくあります。 並列励磁の DC モーター… このような場合には、より複雑な電気駆動システムが使用されます。
図では。図1は、発電機−電動機システム(G_Dと略す)による調整可能な電気駆動装置の図を示す。このシステムでは、誘導電動機 IM が独立励磁の直流発電機 G と並列励磁の低出力直流発電機である励磁機 B を連続的に回転させます。
DCモータDは、機械の作動体を駆動する。発電機 OVG とモーター ATS の励磁巻線は、励磁機 B によって電力が供給されます。加減抵抗器 1 によって発電機 G の励磁回路の抵抗を変化させることにより、モーター D の電機子に印加される電圧が変化します。モーターの速度は調整されています。この場合、加減抵抗器 2 が取り外されているため、モーターは最大の一定磁束で動作します。
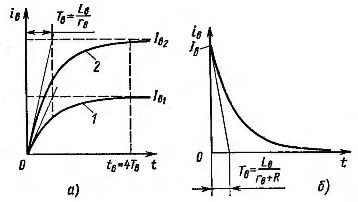
電圧 U が変化すると、速度も変化し、理想的なモーターのアイドル速度 D が変化します。モーターの磁束とその電機子回路の抵抗は変化しないため、傾き b は一定のままです。したがって、Uの異なる値に対応する直線的な機械的特性は、上下に配置され、互いに平行になります(図2)。
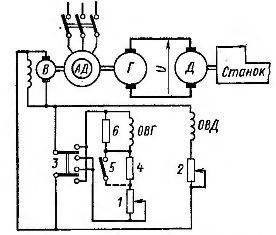
米。 1. システムジェネレータ - DC モーター (dpt)
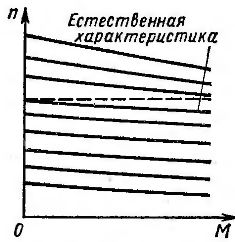
米。 2. 発電機の機械的特性 - DC モーターシステム
これらは、定常ネットワークから給電される同じ電気モーターの特性よりも大きな傾きを持っています。これは、G_D システムでは、発電機の一定の励起電流における電圧 U が、依存性に従って負荷の増加に伴って減少するためです。
ここで、例えばと rg — e をそれぞれ指定します。等pp.と発電機の内部抵抗。
非同期モーターから類推して、次のように表します。
この値は、負荷がゼロから公称値まで増加するときのエンジン速度の低下を特徴づけます。並列機械特性について
この値は、n0 が減少するにつれて増加します。 sn の値が大きい場合、ランダムな負荷変動により指定された切削条件が大きく変化します。したがって、電圧調整範囲は通常 5:1 未満になります。
モーターの定格電力が減少すると、モーター両端の電圧降下が増加し、機械的特性が急峻になります。このため、G -D システムの電圧調整範囲は、電力が減少するにつれて減少します (1 kW 未満の電力の場合は 3:1 または 2:1)。
発電機の磁束が減少すると、その電機子反作用による減磁効果が電圧に大きな影響を与えます。したがって、エンジンの低速回転に関連する特性は、実際には機械的特性よりも大きな傾きを持っています。
制御範囲の拡大は、発電機の全流量時に発生する加減抵抗器 2 (図 1 参照) によってモータ D の磁束を減少させることで達成され、自然速度を超えた特性に対応した速度調整方法です。 1 つ (図 2 を参照)。
両方の方法の制御範囲の積に等しい合計制御範囲は、(10 — 15) に達します。 1. 電圧調整は定トルク制御です (モーターの磁束は変化しないため)。モーター D の磁束を変化させることによる調整は、定電力調整です。
モーターを始動する前に、D レオスタット 2 (図 1 を参照) が完全に取り外され、モーター磁束は最高値に達します。次に加減抵抗器 1 は発電機 G の励磁を増加させます。これにより電圧が増加し、モーター D の速度が増加します。コイル OVG が励磁器 B の全電圧 UB にすぐに接続されている場合、インダクタンスとアクティブ抵抗を持つ他の回路と同様に、その中の電流が増加します。
ここで、rv は励磁コイルの抵抗、LB はそのインダクタンスです (磁気回路の飽和の影響は無視します)。
図では。図3において、a(曲線1)は、励起電流の時間依存性のグラフを示す。励起電流は徐々に増加します。増加率は比率によって決まります

ここで、Tv は発電機励磁巻線の電磁時定数です。それは時間の次元を持っています。
米。 3. G-D系の励磁電流の変更
始動時の発電機電圧の変化は、励磁電流の変化とほぼ同じ特性を持ちます。これにより、加減抵抗器 1 を取り外してもモーターが自動的に始動できるようになります (図 1 を参照)。
発電機の励磁電流の増加は、多くの場合、初期瞬間に公称を超える電圧を励磁巻線に印加することによって加速され (強制的に)、その後、励磁増加のプロセスが曲線 2 に沿って継続します (図 3、a を参照)。 )。コイル内の電流が定格電圧での定常状態の励磁電流に等しい Iv1 に達すると、励磁コイルの電圧は公称値まで低下します。励磁電流が公称値まで上昇する時間が短縮されます。
発電機を強制的に励磁するには、励磁器電圧 V (図 1 を参照) を発電機励磁コイルの公称電圧より 2 ~ 3 倍高く選択し、追加の抵抗器 4 を回路に導入します。 …
発電電動機システムにより回生ブレーキが可能になります。停止するには、アーマチュア内の電流の方向を変える必要があります。トルクも符号が変わり、駆動ではなくブレーキとなります。停止は、モーター加減抵抗器 2 の磁束が増加するとき、または加減抵抗器 1 によって発電機電圧が低下するときに発生します。等c. モーターの E が発電機の電圧 U より高くなります。この場合、モーター D は発電機モードで動作し、移動質量の運動エネルギーによって回転駆動され、発電機 G はモーター モードで動作し、IM マシンを超同期速度で回転させます。同時に発電機モードに切り替わり、ネットワークに電力を供給します。
回生ブレーキは加減抵抗器 1 および 2 に影響を与えることなく実行できます。発電機の励磁回路 (スイッチ 3 など) を開くだけで済みます。この場合、発電機の励磁巻線と抵抗6からなる閉回路の電流は徐々に減少します。
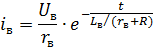
ここで、R は抵抗 6 の抵抗値です。
この式に対応するグラフを図に示します。 3、b.この場合、発電機の励磁電流が徐々に減少すると加減抵抗器 1 (図 1 参照) の抵抗が増加することに相当し、回生制動が発生します。この回路では、発電機の励磁巻線と並列に接続された抵抗6が放電抵抗である。励磁回路の突然の緊急遮断が発生した場合に、励磁巻線の絶縁を損傷から保護します。
励磁回路が遮断されると、機械の磁束が急激に減少し、励磁コイルの巻線に磁束が誘導されます。等c. 自己インダクタンスが非常に大きいため、巻線の絶縁破壊を引き起こす可能性があります。放電抵抗器6は、e.等c. 界磁コイルの自己誘導により、磁束の減少を遅らせる電流が誘導されます。
放電抵抗器の両端の電圧降下は、界磁コイルの両端の電圧に等しい。放電抵抗の値が低いほど、回路が遮断されたときの励磁コイルの電圧は低くなります。同時に、放電抵抗器の抵抗値が減少すると、通常モードで電流が流れ続け、その損失が増加します。放電抵抗値を選択するときは、両方の規定を考慮する必要があります。
発電機の励磁巻線がオフになった後、残留磁気によりその端子には小さな電圧が残ります。これにより、モーターがいわゆるクリープ速度でゆっくり回転する可能性があります。この現象を解消するには、発電機の励磁巻線を励磁機から切り離した後、発電機の端子に接続し、残留磁気による電圧により発電機の励磁巻線に減磁電流を発生させます。
電気モーター D を逆転するには、スイッチ 3 (または別の同様のデバイス) を使用して、発電機 OVG G の励磁コイルの電流の方向を変更します。コイルのインダクタンスが大きいため、励磁電流は徐々に減少し、方向を変え、その後徐々に増加します。
検討中のシステムにおけるモーターの始動、停止、逆転のプロセスは、アーマチュアに含まれる加減抵抗器を使用せずに実行されるため、非常に経済的です。モータの起動と減速は、小さな界磁電流のみを制御する軽量でコンパクトな装置を使用して行われます。したがって、この「発電機 - DC モーター」システムは、始動、ブレーキ、逆転を頻繁に行う作業に使用することをお勧めします。
モーター・ジェネレーター・DC システムの主な欠点は、システム内に多数の電気機械が存在するため、効率が比較的低く、コストが高く、扱いにくいことです。このシステムの価格は、同じ出力の非同期かご型モーターの価格を 8 ~ 10 倍上回ります。また、そのような 電気駆動システム 多くのスペースが必要です。