非同期バルブカスケードを備えた電気ドライブ
 産業界では、速度調整範囲が浅い (3:2:1) ドライブ、つまり非同期電気モーターに基づいて構築され、調整可能な可変ドライブのシステムを代表するいわゆるバルブ カスケードが使用されます。
産業界では、速度調整範囲が浅い (3:2:1) ドライブ、つまり非同期電気モーターに基づいて構築され、調整可能な可変ドライブのシステムを代表するいわゆるバルブ カスケードが使用されます。
スロットルや周波数の調整とは異なり、カスケード接続では、非同期電気モーターが三相交流供給ネットワークに接続されます。これは、最初の 2 つの駆動システムに比べて、この駆動システムの大きな利点です。また、他のすべてのシステムよりも効率が高くなります。この利点は、カスケード システムでは滑りエネルギーのみが変換されるのに対し、DC ドライブや可変周波数システムではモーターによって消費されるエネルギーの全量が変換されるという事実によって説明できます。
スリップエネルギーが抵抗として失われるスロットルアクチュエータやレオスタットアクチュエータ、スリップクラッチと比較すると、エネルギーの点でバルブカスケードの利点はさらに高くなります。これらのシステムのローター回路内のコンバーターは、速度制御のみを目的としています。非同期モーターを使用して構築されたドライブにより、可変電力の高速システムを作成できます。このようなシステムは、スムーズな速度とトルクの制御を提供し、多数の電力や接触機器を必要としません。
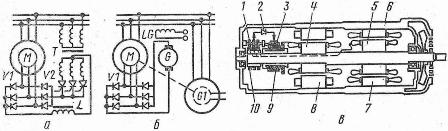
米。 1. カスケードのスキーム: a — バルブ、b — バルブ機械、c — 単体バルブ機械
また、バルブ カスケードは制御能力が低く、自動化が容易で、優れた動的特性を備えています。
バルブカスケードでは、誘導電動機の回転磁束を生成するために回転子回路の周波数変換器が無効電力を循環させないことに注意してください。この磁束はステータ回路に入る無効電力によって生成されるからです。
さらに、バルブステージで使用されるコンバータは、指定された制御範囲に比例する電力のみを得るように設計されています。同時に、周波数制御を備えたシステムでは、コンバーターが磁束の生成に関与するため、その設計ではドライブの全出力を考慮する必要があります。最も単純なバルブ段回路は、中間 DC 回路とバルブ EMF コンバーターを備えた回路です。
バルブ回路 (図 A) およびバルブ-機械カスケード (図 B) では、ローター電流は三相ブリッジ回路に従って整流され、追加の EMF が最初のハウジングの整流電流回路に導入されます。バルブコンバーター、そして2番目はDCマシンからです。図に示す回路。 aは、相回転子を備えた誘導モーターMで構成されています。
バルブコンバータ V1 はロータ回路に含まれており、ロータの AC 電流が整流されます。バルブコンバータを使用すると、スロットル L を通じてインバータ (バルブコンバータ V2) がオンになり、これが追加の EMF の発生源となります。バルブコンバータ V2 は、三相中性回路に従って変圧器 T とともに組み立てられます。通常、小型デバイスで使用されます。
この図では 2 つのバルブ コンバータの機能が明確に示されており、VI バルブは整流器として機能し、スリップ周波数ローターの交流を直流に変換します。バルブ V2 は、直立ローターの電流をネットワークの周波数の交流に変換します。つまり、従属インバーターのモードで動作します。
バルブと機械のカスケード (図 C) では、バルブ コンバーター V1 によって整流されたローター電流が、直流機 G と同期発電機 G1 の助けを借りてネットワークの周波数の交流に変換されます。 。この回路では、マシン G と G1 がインバータの役割を果たします。
非同期バルブ カスケードのさまざまな方式が開発されていますが、基本的で最も一般的な方式を図に示します。興味深いのは、出力 13 kW の AMVK-13-4 単一エンクロージャです。あるケースでは、位相ローターを備えた誘導モーター、DC マシン、および制御されていないバルブのローター グループがこのようなカスケードに配置されます。
この装置は、無段階速度調整機能を備えた AC モーターです。これらのデバイスは、重大な過負荷を克服できます。カスケードは、ステータ回路を切り替えることなく、公称速度 1400 min-1、供給電圧 380 V、調整範囲 1400 ~ 650 min-1 を備えています。
固定子巻線をスターからデルタに切り替える場合、制御範囲は 1400 ~ 400 min-1、トルクは一定、ユニットの重量は 360 kg、励起電圧は 220 V です。この装置は保護された吹き飛ばし構造になっています。これらのユニットはドライブユニットに適用できます。
一体型の弁機械カスケードの概略構成を図に示します。 v.非同期電動機の回転子 5 と直流機の電機子 4 は 1 つのシャフトに取り付けられています。一般的な鋼鉄製の円筒形ベッド6内に、非同期電動機の固定子7と直流機の極8が取り付けられている。非同期モーターのコレクター 9 とスライディング リング 10、コレクター ブラシ 3 とブラシ 1 は、シリコン整流器 2 を介して接続されています。特に低速時に機械から熱を除去するために、ローターとフレームに特別な通気チャネルがあります。
整流されたローター電圧を DC 機械のアーマチュアに供給するブリッジ整流器は、150 V の逆電圧を備えた 6 つの VK-50-1.5 バルブから組み立てられており、省エネが不可欠です。
検討中のシステムの説明された利点に加えて、それらの欠点にも注意する必要があります。バルブコンバーターとバルブマシンドライブのコストが高いこと、ドライブが非同期モーターに比べて低い力率、低効率であることです。回転子巻線モーターの短絡がなく最高速度で動作します。 誘導モーターの過負荷容量が低く、駆動モーターの使用率が低い (約 5 ~ 7%)。 浅い速度制御で始動特性を提供する特別な始動手段が必要です。 。