サイリスタコンバータの欠点
現在、DC モーター コンバータの主なタイプはソリッド ステート サイリスタです。
サイリスタには次のような欠点があります。
1. 片側導通のため、デバイスの数を 2 倍にする必要があります。
2. 過負荷電流が小さく、電流の上昇速度も抑えられます。
3. 過電圧に対する感度。

レギュレーションがない場合の整流電圧の平均値は、主にサイリスタ コンバータのスイッチング回路によって決まります。変換回路は、ゼロ端子とブリッジの 2 つのクラスに分類されます。中電力および高電力の設備では、主にブリッジ コンバータ回路が使用されます。これには主に次の 2 つの理由があります。
-
各サイリスタの電圧が低くなり、
-
変圧器の巻線を流れる電流の一定成分が存在しないこと。
コンバータ回路のフェーズ数も異なります。低電力設備の 1 フェーズから高電力コンバータの 12 ~ 24 フェーズまであります。

サイリスタ コンバータのすべてのバリエーションには、低慣性、回転要素の欠如、(電気機械コンバータと比較して)サイズの小型化などのプラスの特性とともに、多くの欠点があります。
1. 主電源へのハード接続: 主電源電圧のすべての変動は駆動システムに直接伝達され、モーター軸上の負荷サージは直ちに主電源に伝達され、電流サージを引き起こします。
2. 電圧降下調整時の力率が低い。
3. 高調波の発生、電力網への負荷。
一般にサイリスタとコンバータの単極性導電性に関連して、1 つのコンバータが存在する最も単純な回路でのモータの逆回転は、適切なコンタクタを使用して電機子または励磁コイルを切り替えることによってのみ実行できます。当然のことながら、この条件下では、大電流または高インダクタンス回路のいずれかを切り替える必要があるため、電気機械システムの動作は満足のいくものではなくなります。したがって、通常は 2 つのコンバーターが使用され、それぞれが 1 つの回転方向で動作するように設計されています。

サイリスタドライブの技術的および経済的指標、つまり速度調整の範囲、制動、逆転のいずれかの方法の可能性、機械的特性の種類などは、電源方式によってほぼ事前に決定されます。
メイン (電源) 回路のさまざまなスキームは、次の 4 つの主要なオプションに集約できます。
1. 1 つの制御されたコンバータからの DC モーターの電機子電源。この図と次の図は、図面を簡略化し、基本的な違いを識別するために、単相 AC ネットワークからの供給を想定して示されています。
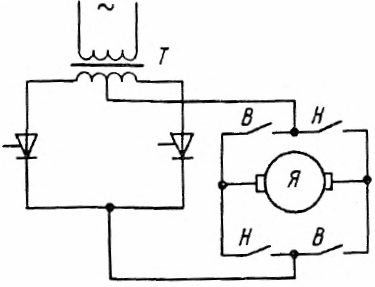
電機子回路に 1 つのサイリスタ コンバータ、正転および逆転用の V、N コンタクタを備えた制御コンバータ - モータ システム
この場合、速度調整はモーターの電機子に印加される電圧を変更することによってのみ行われます。モーターの逆転 — コンタクタを使用して電機子電流の方向を変更することによって。ブレーキは電磁式です。
電機子回路に可逆接触器が存在するため、特にモータ出力が大きい場合、設置コストが高くなり、頻繁な反転や停止を必要としない機構にのみ適しています。この回路には回生ブレーキ機能はありません。
2. 交差回路に接続された 2 つのコンバータからモーターの電機子に電力を供給します。一方の回転方向では一方のインバータが動作し、もう一方の回転方向では逆の動作がサイリスタを制御することで実現され、コンバータの 1 つをインバータ モードに移行することで保証されます。
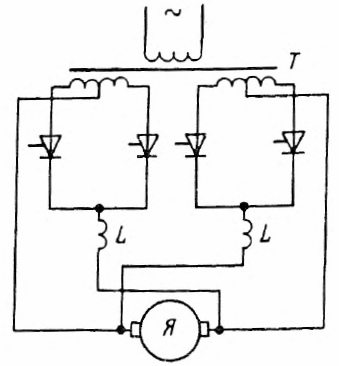 2 つのインバータが交差回路で接続された制御されたインバータ - モータ システム
2 つのインバータが交差回路で接続された制御されたインバータ - モータ システム
この回路は、電機子回路に大型の逆転コンタクタを必要とせず、スムーズで信頼性の高いエネルギー回収停止を提供し、一般に頻繁な逆転に使用されます。
この回路の欠点は、2 組のサイリスタと 2 倍の電源変圧器の 2 次巻線が必要なため、複雑でコストがかかることです。
3. コンバータの並列逆接続。スキームのプロパティは前のスキームと似ています。利点は、電源トランスの二次巻線が少ないことです。
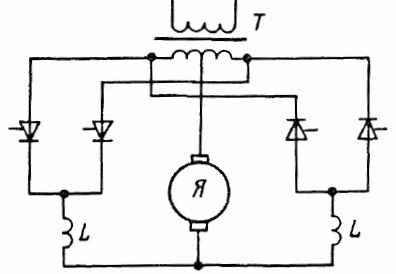
コンバータを並列逆接続したインバータ・モータ制御システム
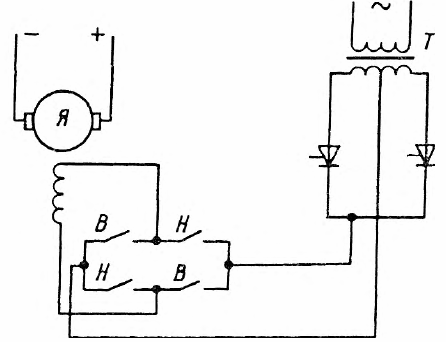
モーター励磁回路に制御コンバーターを備えたコンバーターモーターシステム
このデバイスは、一定かつ十分に高い力率で動作します。逆に、励磁回路内の電流の方向を変えることにより、過渡現象が抑制されます。このシステムは、多数の後退と停止を必要とする機構にはあまり適していません。