さまざまな種類の負荷および動作モードを持つ機器用の電動モーターの選択
 生産機構用の電気モーターを正しく選択することで、標準耐用年数全体にわたって電気モーターの継続的かつ信頼性の高い動作が保証されます。これは、さまざまな要素と基準を考慮する必要がある非常に重要なプロセスです。最も重要な要素の 1 つは、負荷の性質と種類を考慮することです。
生産機構用の電気モーターを正しく選択することで、標準耐用年数全体にわたって電気モーターの継続的かつ信頼性の高い動作が保証されます。これは、さまざまな要素と基準を考慮する必要がある非常に重要なプロセスです。最も重要な要素の 1 つは、負荷の性質と種類を考慮することです。
選択する際に考慮すべき基準は次のとおりです。 適切な電動モーターの選び方
さまざまな機械、設備、機械用の電気モーターを選択するときは、さまざまな種類の負荷、機械的特性の種類、これらのメカニズムの作業サイクルの性質と期間を考慮する必要があります。
選択した電気モーターのシャフトの負荷がどのように変化するかを知ることで、動作中に電力損失がどのように変化するかを正確に判断することができます。これにより、特定の負荷で動作しても過熱しない電気モーターを選択できます。 。電気モーターの絶縁体の最大加熱温度は、動作サイクル全体を通じて許容値を超えません。
生産機構の電動モーターの選択を誤ると、生産プロセスの中断につながり、製造された製品の損失や追加の電力コストにつながります。
電気モーターを備えた電気機器は、技術プロセスの要件を完全に満たさなければなりません。
以下の条件が満たされている場合、カタログ タイプの電気モーターのいずれかの選択が正しいとみなされます。
-
機械的特性の点で電気モーターと作業機械 (駆動機構) が最も完全に一致します。これは、電気モーターが、定常状態および過渡状態でドライブに必要な速度と加速度の値を提供できるような機械的特性を備えている必要があることを意味します。
-
すべての動作モードで電気モーターの出力を最大限に活用します。最も厳しい動作モードにおける電気モーターのすべてのアクティブ部品の温度は、許容加熱温度にできる限り近づける必要がありますが、それを超えてはなりません。
-
電気モーターと駆動装置および設計上の環境条件との適合性。
-
電気モーターが電源のパラメーターに準拠していること。
電気モーターを選択するには、次のデータが必要です。
-
駆動機構の種類と名前。
-
動作モードが連続的で負荷が一定の場合は最大シャフト出力、その他の場合は時間の関数としてのシャフトの出力または抵抗モーメントの変化のグラフ。
-
ドライブシャフトの回転周波数(または回転周波数範囲)。
-
駆動機構と電気モーターのシャフトの連結方法(キネマティックトランスミッションがある場合は、トランスミッションの種類とギア比が示されます)。
-
電気モーターがドライブシャフトに提供しなければならない始動トルクの量。
-
速度規制制限(上限値と下限値、および対応する出力とトルクの値)。
-
速度制御の要求品質(滑らかさ、階調性)。
-
1 時間以内のドライブのアクティブ化の頻度。
-
外部環境の特徴。
あらゆる条件と公称データを考慮した電動機の選択は、カタログに従って行われます。

電気ドライブの可能な動作モードは、サイクルの性質と期間、負荷値、冷却条件、始動損失の比率とスムーズな動作などの点で非常に多様であるため、それぞれに適した電気モーターの製造が必要です。電気駆動装置の考えられる動作モードのいくつかを考慮することは、実際には意味がありません。
実際のモードの分析に基づいて、特別なクラスのモード、つまり公称モードが特定され、これに合わせてシリアル エンジンが設計および製造されます。
電気機械のパスポートに含まれるデータは、特定の公称モードを指し、電気機械の公称データと呼ばれます。
メーカーは、電気モーターが定格負荷で定格モードで動作する場合、熱が完全に利用されることを保証します。
現在の GOST は 8 つの公称モードを提供しており、国際分類に従って S1 ~ S8 の記号が付いています。
連続使用 S1 — すべての部品の温度を一定に保つのに十分な時間、一定の負荷で機械を動作させること。
短期デューティ S2 — 機械のすべての部分が設定温度に達するのに不十分な時間、一定の負荷で機械を動作させた後、機械を 2 以下の温度に冷却するのに十分な時間機械を停止します。周囲温度から °C。短時間勤務の場合、勤務時間は15分、30分、60分、90分となります。
断続的デューティ S3 — 一連の同一のデューティ サイクル。それぞれのデューティ サイクルには、機械が設定温度まで加熱されない連続負荷動作時間と、機械が周囲温度まで冷却されない駐車時間が含まれます。
このモードでは、突入電流が温度上昇に大きな影響を与えないデューティ サイクルになります。サイクル時間は熱平衡を達成するには不十分であり、10 分を超えません。このモードは、含まれる期間の値をパーセンテージで表すことによって特徴付けられます。
この動作モード用に業界で製造されたモーターは、1 つのデューティ サイクルの継続時間によって定義されるデューティ サイクル (PV) によって特徴付けられます。
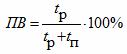
ここで、tp はエンジンの稼働時間です。 tp — 一時停止時間。
含まれる期間の標準化された値: 15、25、40、60%、または作業期間の期間の相対値: 0.15。 0.25; 0.40; 0.60。 S3 モードの場合、定格データは特定のデューティ サイクルにのみ対応し、デューティ期間を指します。
現在、モード S1 ~ S3 が主なモードであり、その公称データは地元の電気自動車工場によってカタログと機械のパスポートに記載されています。
詳細については、こちらをご覧ください。 電気モーターの動作モード
電力の観点から合理的なモーターを選択するには、モーターのシャフト負荷が時間の経過とともにどのように変化するかを知る必要があり、これにより電力損失の変化の性質を評価することが可能になります。
さらに、エンジン内のエネルギー損失の解放の結果としてエンジンを加熱するプロセスがどのように進行するかを確立する必要があります。このアプローチにより、巻線絶縁体の最大温度が許容値を超えないようにモーターを選択できます。この状態は、エンジンの耐用年数全体にわたって信頼性の高い動作を保証するための主要な状態の 1 つです。
電気モーターの出力は、作業機械にかかる負荷の性質に応じて選択する必要があります。このキャラクターは 2 つの理由で評価されます。
-
公称動作モードによる。
-
消費されるエネルギー量の変化によって。
エンジン出力は次の 3 つの条件を満たす必要があります。
-
動作中の通常の加熱。
-
十分な過負荷容量。
-
十分な始動トルク。
いわゆる電気モーターの選択スケジュールに従って可能な最大の負荷に基づく「パワーリザーブ」は、電気モーターの十分な活用につながり、その結果、力率と効率の低下による資本コストと運転コストの増加につながります。エンジン出力が過度に増加すると、加速中にぎくしゃくする可能性もあります。
電気モーターが一定またはわずかに変化する負荷で長時間動作する必要がある場合、その出力を決定することは難しくなく、公式に従って実行されます。他の動作モードでは電気モーターの出力を選択することははるかに困難です。

短期負荷は、含まれる期間が短く、電気モーターを完全に冷却するには休憩が十分であるという事実によって特徴付けられます。この場合、スイッチング期間中の電動機の負荷は一定またはほぼ一定のままであると想定されます。
このモードで電気モーターを暖房に正しく使用するには、その連続電力 (カタログに示されている) が短期負荷に対応する電力よりも小さくなるように電気モーターを選択する必要があります。電気モーターは、短期間の動作中に熱過負荷が発生します...
電気モーターの動作期間が完全な加熱に必要な時間よりも大幅に短いが、スイッチを入れる期間間の休止時間が完全な冷却時間よりも大幅に短い場合は、短期間の負荷が繰り返されます。
連続運転のための電力計算とモーターの選択
シャフト負荷が一定またはわずかに変化する場合、モーター出力は負荷出力をわずかに超えるだけです。この場合、条件を満たさなければなりません
Pn ≧ P、
ここで、Pn は定格エンジン出力です。 P — 負荷電力。エンジン選びはカタログから選ぶことになります。
連続運転のためのエンジン出力の選択。生産機構のトルクと出力が変わらない場合は、トランスミッション (ギアボックス) の損失を考慮して、公称出力 Pn が負荷の出力と等しいモーターを選択する必要があります。
Pn ≧ Pm /ηt、W
ここで、ηt はトランスミッション (ギアボックス) 効率です。
所定の瞬間の駆動機構の抵抗 Ms、N・m、およびギアボックスの出力シャフトの回転周波数 n2、rpm
Pm = Mc ∙ ω2、W
ここで、ω2 = 2π ∙ n2 / 60、rad / s
シャフト抵抗のモーメントが一定である連続モードで動作する一部の生産機構では、モーターの出力を決定するための近似式があります。
短期負荷の電力計算とモーターの選択
電気ドライブの短期間動作用のモーターは、動作時間を考慮して、定格電力に応じて選択されます。定格電力は負荷電力と等しくなければなりません。短期間の運転のために業界で製造されたエンジンの標準許容値は、10、30、60、90 分です。
間欠運転用モーターがない場合は、間欠運転用モーターを取り付けることができます。この場合、実行時間 30 分はデューティ サイクル = 15%、60 分はデューティ サイクル = 25%、90 分はデューティ サイクル = 40% に対応します。最後の手段として、Pn < P での連続運転にモーターを使用し、その後熱状態をチェックすることが可能です。
断続負荷に対する電力計算とモーターの選択
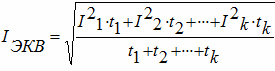
断続モードで動作する電気ドライブの場合、モーター出力は平均損失法または同等の値を使用して計算されます。最初の方法はより正確ですが、より多くの労力がかかります。等価値の方法を使用する方が便利です。指定された負荷スケジュールに応じて、P = f (t)、M = f (t)、I = f (t)、平均二乗値が決定されます。同等と呼ばれます。
等価電力は負荷図の RMS 電力です。
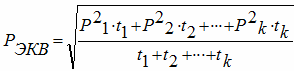
ここで、t1、t2、…、tk — 負荷電力がそれぞれ P1、P2、…、Pk に等しい時間間隔。
カタログによれば、求めたReqvとPVの値に対し、Pn≧REKVの条件からモータ定格電力を選定します。
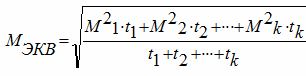
図 M = f (t) が与えられた場合、等価モーメントは
速度 n での等価電力は次の式で与えられます。
Req = Meq • n / 9550 (kW)。
I = f (t) の図が与えられると、加熱相当物の電流は
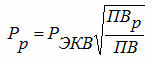
PVr の計算値は標準値と異なることが多いため、取得した PVr の値を最も近い標準値に四捨五入するか、次の式を使用して等価電力を再計算します。
動作中、モーターの公称出力を超える短期間の過負荷が観察されます。エンジンの加熱には大きな影響を与えませんが、誤作動や失速を引き起こす可能性があります。したがって、モーターの過負荷容量を次の式に従ってチェックする必要があります。
Pm / Pn = ku ∙ Mm / Mn、
ここで、Pm は負荷図の最大電力です。 Mm / Mn — 最大トルクの倍数はカタログによって決定されます。係数 ku = 0.8 は、ネットワーク内で起こり得る電圧降下を考慮しています。
この条件が満たされない場合は、より高出力のモーターをカタログから選択し、過負荷容量を再度確認する必要があります。
このトピックについては、以下も参照してください。 間欠運転用エンジンの選定

業界では、断続負荷モーターのシリーズを多数製造しています。
-
MTKFシリーズのリスローターとMTFシリーズのフェーズローターを備えた非同期クレーン。
-
類似の冶金シリーズ MTKN および MTN。
-
DCシリーズD.
指定シリーズの機械は、慣性モーメントを低減するために細長いローター (アンカー) の形状を特徴としています。過渡時に固定子巻線で発生する損失を減らすために、MTKF および MTKN シリーズのモーターの公称スリップ snom = 7 ÷ 12% が増加しました。クレーンおよび冶金シリーズのモーターの過負荷容量は、デューティ サイクル = 40% で 2.3 ~ 3 であり、デューティ サイクル = 100% では λ = Mcr / Mnom100 = 4.4 ~ 5.5 に相当します。