自励式ダイナミックブレーキモードで動作する非同期電動機の選択
 最も単純な制御方式を備えた巻線ローターを備えた非同期電気モーター。ローター回路に抵抗が含まれるため、制御特性が非常に低くなります。したがって、市場で周波数コンバータが利用可能になる前に、降圧モードで速度を低下させるためにさまざまな方式が開発されました。
最も単純な制御方式を備えた巻線ローターを備えた非同期電気モーター。ローター回路に抵抗が含まれるため、制御特性が非常に低くなります。したがって、市場で周波数コンバータが利用可能になる前に、降圧モードで速度を低下させるためにさまざまな方式が開発されました。
実際には、それほど多くはありません。海外では、追加の電気機械 (主エンジンと同じシャフトに取り付けられた渦ブレーキ) の使用が普及しました。このスキームにより、負荷を下げるときに十分な剛性の機械的特性を得ることができますが、そのような電気駆動装置は非常に低いエネルギー特性を持っています(ブレーキエネルギーは渦ブレーキで放出されます)。さらに、渦ブレーキはコストがかなり高く、機械部品のレイアウトが非常に複雑になります。
したがって、1970 年代後半にダイナモ工場で位相回転子を備えた非同期モーターをベースにした昇降機構で着陸速度を得るために、E.M. が率いる設計チームは、ペブツナーは自励式ダイナミックブレーキを導入しました。
このような電気駆動装置は、家庭用クレーン(橋梁用TSD、TSDI、KSDBタイプのパネル、ガントリーおよびガントリークレーン、タワークレーン用のコントロールパネルKB-309、KB-403、KB-404、KB-405、KB-)で広く使用されています。 406、KB-408、KB-415、KB-415-07、KB-473、KBM-401P。)。つまり、何万台ものクレーンが稼働しているということになります。
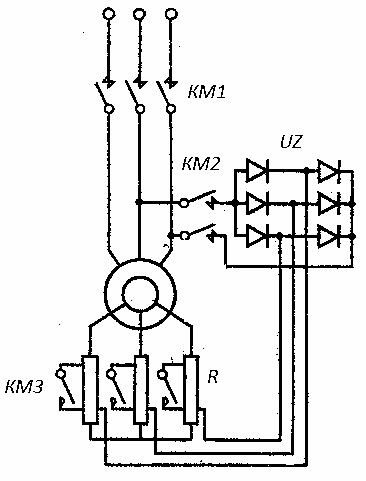
米。 1. 非同期モータを自励式発電制動モードに組み込む方式
自励式ダイナミックブレーキの原理は次のとおりです。
ローター回路には以下が含まれます。 三相整流器 UZ(図1)。電気モーターはコンタクター KM1 を介してネットワークから切り離されます。整流された電圧はコンタクタ KM2 を介して固定子巻線に接続されます。コンタクタ接点 KM3 が閉じています。ブレーキが解除されると(図示せず)、落下する重りの作用を受けてモーターシャフトが回転し始めます。
EMF がロータ巻線に誘導され、その影響でロータ - ステータ回路に電流が流れ始めます。モーターが制動トルクを発生させ、負荷が一定速度で低下します。速度値はローター回路の抵抗値によって決まります。抵抗が大きいほど、降下速度は速くなります。速度を上げるには、コンタクタ KM3 をオフにします。
自励式ダイナミック ブレーキ モードでは、電気ドライブはブレーキ油圧プッシャーとリレー コンタクタ装置に電力を供給するためだけにネットワークから電力を消費します。例として、図。図7は、TSDパネルを備えた電気駆動装置の機械的特性を示している。
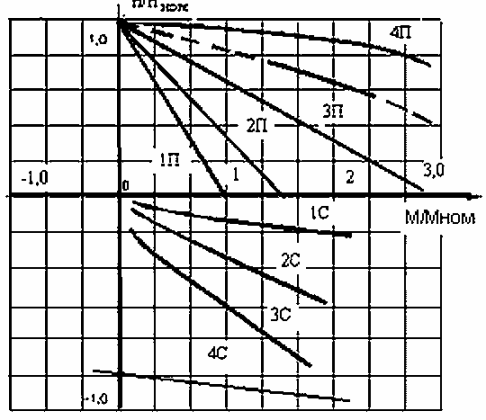
米。 2. TSDパネルを使用した昇降機構の電気駆動の機械的特性
動的ブレーキ特性は 1C、2C、3C として指定されます。十分な硬度を持った特性であることが分かります。速度調整は 1:8 の範囲で実行され、ほとんどの場合、大量の蛇口にはこれで十分です。
電気モーターの自励の条件は次のとおりです。
ここで、x'2 - 回転子巻線の誘導抵抗、オーム。 хо- 励磁回路の誘導抵抗。ああ、
ここで、 ks — スキームの係数
kd — ステーター電流に対するローター電流の減少係数。 kcx — 三相ブリッジ回路の補正回路係数 kx = 0.85; kt はモーターのステーターからローターへの変換係数です。
係数 kd は、家庭用蛇口モーターのスターに 380 V の主電源電圧で接続される固定子巻線の接続方式によって異なります。
係数 kt は変換係数に依存します。つまり、ステーター電圧とローター電圧の比率。これはモーターのタイプによって異なります。たとえば、MT および 4MT シリーズのいくつかの電気モーターの値と関連パラメータが表にまとめられています。 1.
表1。
電動機タイプ 電力、kWt ローター電圧、V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31 1.31 0.197 3.73 1.05 MTN512- 6 55 340 1.11 0.98 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.98 1.02
条件 кс ≥ √(1 + 2х '2/хо) は、タイプ MTN412-6、4MTN225L6 のエンジンに対して実行され、「励起」と呼ぶことができます。このような電気モーターは、追加の回路決定を行わずに自励モードに入ります。ただし、このようなモーターと連携して動作するように設計された低電圧完成装置 (低電圧開閉装置または制御パネル) では、信頼性の高い動作のために小さな初期励磁が提供されます。
初期励起は、いわゆる定数を渡すことによって実行されます。半波整流器からの小さな値の「供給電流」(通常はモーターの定格電流の 10% 以下)。励磁されたモーターの場合、いずれの場合でも、これは自励ダイナミック ブレーキ モードに確実に移行するには十分です。
条件 кс ≥ √(1 + 2х '2/хо) が満たされない電気モーター MTN512-6、4MTN280M6 は「無励磁」になります。これは、そのようなモーターが自励式のダイナミック ブレーキ モードで動作できないことを意味するものではありませんが、モーターに必要な追加電流の値はステーターの定格電流の 50% に達します。このため、非励磁電気モーター用の特別な NKU (制御パネル) を使用する必要があります。 …
кс = √(1 + 2х '2/хо) の電気モーター タイプ 4MTN280L10 は自励の限界にあり、パラメータのランダムな変更は自励条件に違反する可能性があります。したがって、そのようなモーターは非励磁型として分類することもできます。
電気モーターの自励能力に影響を与える主なパラメーターは、ローターの定格電圧 E2nom です。大きな供給電流がなければ自励励起が起こらない E2nom の臨界値は 300 V と見なされます。
自励ダイナミックブレーキモードのこの特性は、1980 年代初頭に一連の 4MT クレーン電気モーターを開発する際に、ダイナモ工場と Sibelektromotor PO によって考慮されました。
特に一部の電動機については、従来のMTシリーズに比べてE2nom値を低減し、電動機を励磁しやすくしています。
たとえば、タワー クレーンの電気駆動に広く使用されている 4MTN225L6 電動モータの場合、従来の MTN512-6 シリーズ モータと比較して E2nom が 340 V から 290 V に低下し、モータが自励式になりました。その後、OJSC「Sibelectromotor」が同じパラメータで電気モーター 4MTM225L6 の生産を開始しました。
時間が経つにつれ、同様の目的を持った電気モーターが他のメーカーによって生産されるようになりました。
Rzhevsky Crane Construction Plant は MKAF225L6 電気モーターを生産し、Siberian Electrotechnical Company は 4MTM225L6 PND 電気モーターを生産します。各メーカーの技術力に関連してプロトタイプとは外観が異なりますが、これらの電気モーターはすべて同じ電気的パラメータと設置寸法を備えており、完全に互換性があります。
エンジンの名前の違いにより、ユーザーは自分の好み、価格、納期などに基づいて、情報に基づいてメーカーを選択することができます。また同時に、ある蛇口メーカーの電動モーターを別のメーカーの電動モーターに交換することにより、蛇口の故障や事故が発生しないように十分ご注意ください。
しかし、ここ 10 年でさまざまなメーカーの電気モーターが国内市場に登場し、そのブランドは JSC が製造した「オリジナル」電気モーターのブランド「Sibelectromotor」を正確に再現しています。電気モーターの起源は、我が国の東にある大きな隣国と関係があると考えられます。価格は従来のメーカーよりわずかに安いため、企業の供給からの関心も理解できます。
したがって、製造されたクレーンに取り付ける電気モーターを注文するか、クレーンの損傷した電気モーターを正常な電気モーターと交換することで、プロトタイプの電気モーターとは異なる E2nom を備えた未知のメーカーの電気モーターを入手できます。
この状況は、同じ名前のいくつかのポップ グループが同時に全米ツアーを行った 90 年代初頭を彷彿とさせます。
E2nom / I2nom の比は巻線ロータを備えたモータの最も重要なパラメータであり、起動抵抗器、リレー接触器装置の選択、そして前述したようにモータの自励条件に影響を与えることをもう一度思い出してください。電気モーター。
しかし、多くの場合、クローンエンジンの銘板にはローターのデータがまったく記載されていません。以下に例を示します。
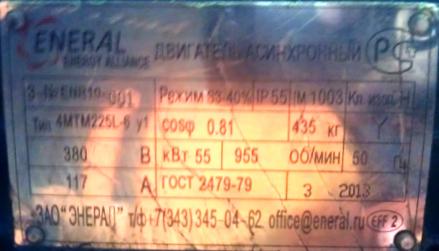
米。 3. ロータークレーン非同期モーター銘板
ちなみに、この電気モーターの値は「正しい」値 E2nom でしたが、今では経験的に決定する必要がありました。
4MTM225L6 電気モーターの他のメーカーのカタログでは、値 E2nom = 340 V が示されています。励磁されていたモーターが無励磁になりました。このような電気モータを自励式ダイナミックブレーキを備えた電気駆動装置の一部として使用すると、負荷が低下し、電気モータが分離し、ロータおよびステータ巻線が機械的に破壊されます。
著者がロシア最古の機械製造企業の一つで最近観察したのはまさにこの写真であり、そこでは E2n = 340 V のタイプ 4MTM225L6 のクローン電気モーターを搭載した新しい橋形クレーンが納入されました。苦しむ。さらに、クレーンの所有者は、回避した後にエンジンを3回(!)回復します。
別のクローン電気モーターのメーカーは、どうやら同様の事故を繰り返し経験しているようですが、現在同じブランド (!) で 2 つの電気モーターを製造しています。 1 つは E2nom = 340 V、もう 1 つは E2nom = 264 V で、カタログには「タイプ KB タップ用」という注記が付けられています。タワークレーン。
このようなモーターはタワー クレーンで最も広く使用されていますが、橋形クレーンにも取り付けられています。したがって、サプライヤーと顧客の間の会話を聞くことができます。「どのクレーンにモーターが必要ですか?」床材用。次に、これを取り上げます (E2nom = 340 V)。 » そして、電気ホイストの駆動部には、自励式ダイナミックブレーキを備えた制御パネルがあります。結果は上で説明されています。
同時に、これらの電気モーターには欠陥がある、あるいは信頼性が低く、クレーンには使用できないなどとは誰も言っていません。市場の選択肢が多ければ多いほど良いのです。彼らが言うように、もっと優れた異なるエンジンがあります。ただ、彼らのブランドは消費者を誤解させており、危険な結果を伴う可能性があります。
プロトタイプ以外のローターパラメータで電気モーターを使用するには、次のことを行う必要があります。
-
回転子回路が開いており、固定子巻線がグリッドに接続されているときに E2nom を測定します。
-
E2nom 測定に基づいて、バラスト抵抗を計算、選択、注文します。
-
無励磁電動機用制御盤をカタログより選択しご注文ください。
あるいは、価格に魅力を感じるエンジンを注文する前に E2nom の価値について尋ね、契約で特にこれに同意することもできます。ただし、ご注文いただいたモータの入力制御中に E2nom を測定することを妨げるものではありません。
上記を要約すると、次の結論を導き出すことができます。
-
フェーズローター電気モーターに基づく家庭用蛇口の電気駆動では、自励式ダイナミックブレーキが広く使用されています。このような電気駆動装置は何万台も稼働しています。現在も発行され続けています。
-
自励ダイナミックブレーキモードで動作するには、電気モーターが特定の E2nom / I2nom 比を持っている必要があります。
-
巻線ロータを備えた電気モーターの自励の主な条件は、E2nom ≤ 300 V の値です。
-
E2nom > 300 V の電気モーターを、励磁された電気モーター用に設計された制御パネルとともに使用すると、負荷が低下して電気モーターが破損する可能性があります。