電気駆動システムにおける電気モーターの主な動作モード
 電気駆動モーターの動作の全体像は、直交座標系の 4 つの象限にプロットされた機械的特性を調べることによって得られます (図 1)。これらの特性は、電気モーターの 2 つの主な動作モード、モーターとブレーキに対応します。
電気駆動モーターの動作の全体像は、直交座標系の 4 つの象限にプロットされた機械的特性を調べることによって得られます (図 1)。これらの特性は、電気モーターの 2 つの主な動作モード、モーターとブレーキに対応します。
モーターモードは電気モーターの動作モードと呼ばれ、後者が作業機構を駆動します。ブレーキモードでは、駆動力が機構となり、モーターがこの力のバランスをとるか、減速します。
動作モードに応じてトルクの方向と回転速度が変わります。電気モーターの回転速度とトルクの正の方向については、次のようになります。
1) 垂直動作の場合 — 荷物を持ち上げるときの電動モーターの回転方向と、電動モーターが荷物を持ち上げるために動作する場合のトルク、
2) 水平方向の動き、たとえばさまざまな種類のカートの場合、機構の動きの方向の 1 つ (前方、右) と、この動きに対応するモーターによって発生するトルク。この場合、モーターが克服するモーメントは負になります。
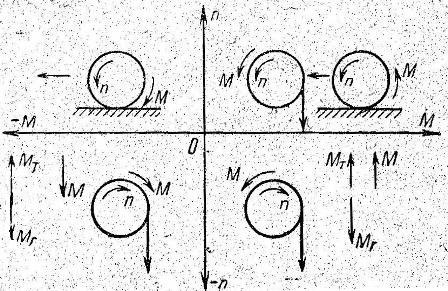
米。 1. 直交座標軸における駆動モーターの動作モードのイメージ
図からわかるように。図1に示されるように、座標系の第1象限では、電気モータはモータモードで動作する(例えば、荷物を持ち上げたり、カートを移動したりするとき)。第 2 象限は、ブレーキを伴う機構の水平移動中の電気モーターの動作モードに対応し、電気モーターが機構のシャフトの動きに対抗する制動モーメントを生成します。
第 3 象限では、負荷モーメントが機構やギアの摩擦モーメントに勝てず、電動モーターが負荷の軽減に役立ち、負荷の方向と一致するモーター トルクが発生する、軽負荷の低下時に電動モーターが動作する場合を考慮します。荷重の動きですが、荷重が持ち上げられる瞬間とは符号が逆になります。
最後に、第 4 象限は、外部トルクの影響下でモーターが回転する場合を指します。このモードは、たとえば重い荷物を降ろすときに、電気モーターがブレーキトルクを発生させて荷物を保持し、昇降機構の速度の上昇を妨げるときに発生する可能性があります。この場合、モーターのトルクは吊り上げ時と同じ向きになるため、符号は正となります。