電気機械のカスケード接続
 電気機械のカスケード接続は、回転子回路に外部起電力を導入し、回転子の起電力と一致するか逆方向に、回転子周波数と等しい周波数で誘導電動機の回転速度をスムーズに制御するシステムです。
電気機械のカスケード接続は、回転子回路に外部起電力を導入し、回転子の起電力と一致するか逆方向に、回転子周波数と等しい周波数で誘導電動機の回転速度をスムーズに制御するシステムです。
このような機械カップリングは、以前は、たとえば不可逆ローラーミル、大型ファン、鉱山ファン、遠心ポンプなどの中出力および大出力の不可逆電気ドライブの非同期モーターの速度を制御するためによく使用されていました。
電気機械のすべてのカスケード接続は、定電力 P = const のプラントと定トルク M = const のプラントの 2 つの主なカテゴリに分類できます。
一定電力の設備は、メインの非同期モーターを備えたカスケードに含まれる機械の 1 つが、このモーターのシャフトと機械的に関節接続されているという事実によって特徴付けられます (図 1、a)。事後設置では、そのような機械的な接続はなく、追加のマシンを 1 台ではなく、少なくとも 2 台のマシンを使用する必要があります (図 1、b)。これらのマシンの 1 つは DC または AC コレクターです。
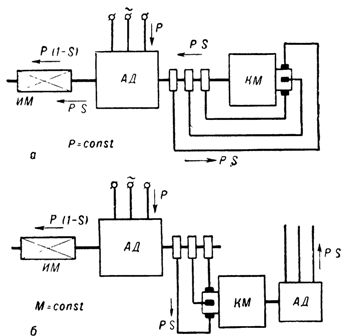
米。 1. カスケード設置の概略図: a — 定電力 (P = const)、b — 定トルク (M = const)。
誘導モーターと DC 機械のカスケード設置を作成するには、誘導モーターの回転子と DC 機械の電機子の間にスリップ - DC エネルギー コンバーターを組み込む必要があります。
カスケードはコンバータの種類によっても変わります。原則として、カスケードの変更は、スキーム P = const とスキーム M = const の両方に従って実行できます。
単一電機子コンバータ カスケード (図 2) では、コンバータの動作条件に応じた速度調整は 5 ~ 45% の範囲に制限されます。
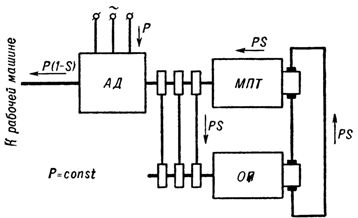
米。 2. 誘導電動機カスケードと単一電機子コンバータ (P = const) を備えた DC 機の概略図。
エネルギーの流れの方向は図の通りです。 1、a、b、図では。図2は、補助集電機が電動機モードで動作しているときに、準同期ゾーンで誘導電動機の速度を調整する場合を示している。滑りエネルギーはシャフトまたはウェブに伝達されます。
同期モーターよりも高い速度で調整可能な非同期モーターを動作させるには、ステーター側とローター側の 2 つの電源を使用する必要があります (図 1、b)。この場合、コンバータはジェネレータ モードで動作します。
風洞ファンは、幅広い速度制御を備えた電気駆動を必要とする最も強力な機構の 1 つです。一部の風洞では、20,000、40,000 kW の電動ファン駆動が必要で、速度制御は 1:8 ~ 1:10 の範囲で、設定速度を数分の 1 の精度で維持する必要があります。この問題に対する解決策の 1 つは、電気機械のカスケード接続の使用でした。

制御対象装置の出力が大きく、誘導電動機の回転子周波数の変動範囲が広いため、直流機に電力を供給できないため、単一電機子コンバータの使用や発電機 - 電動機システムの使用が不可能でした。単一の電機子で 7000 kW を超えます。このような設備では、同期モータと直流発電機からなる2台のユニットがコンバータとして使用されます(図3)。
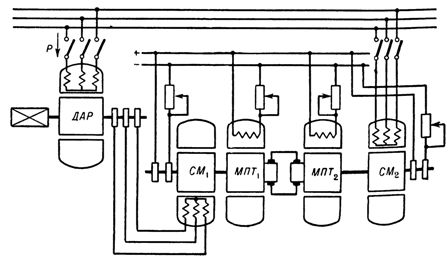
誘導電動機と電動発電機コンバータを備えた直流機のカスケード図
カスケードは、巻線ローターを備えたメイン可変速誘導モーター、可変速ユニット、定速ユニットで構成されます。速度調整は励磁を変えることで行われます。