最新のブラシレス DC モーター
半導体エレクトロニクスの大幅な進歩と強力なネオジム磁石を作成する技術のおかげで、ブラシレス DC モーターは今日広く使用されています。洗濯機、掃除機、扇風機、ドローンなどに使用されています。
そして、ブラシレスモーターの動作原理のアイデアは、19世紀初頭にはすでに表明されていましたが、技術が実用化される準備が整った半導体時代の初めまで待機していました。この興味深く効率的なコンセプトにより、ブラシレス直流モーターは今日と同様に広く歩行できるようになりました。 …
英語版では、このタイプのエンジンと呼ばれます。 BLDC モーター — ブラシレス DC モーター — ブラシレス DC モーター。モーターのローターには、 永久磁石、動作巻線はステーター上にあります。つまり、BLDC モーター デバイスは、古典的なブラシ付きモーターのデバイスとは完全に反対です。 BLDC モーターは、と呼ばれる電子コントローラーによって制御されます。 ESC — 電子スピードコントローラー — 電子クルーズコントロール。
電子レギュレータと高効率
電子レギュレータにより、ブラシレスモーターに供給される電気エネルギーを滑らかに変化させることができます。過剰な電力を熱に変換する抵抗負荷をモーターと直列に接続することで単純に電力を制限する単純な抵抗式調速機とは異なり、電子速度制御は、供給される電力を無駄な加熱に費やすことなく、大幅に高い効率を実現します。 ..
ブラシレスDCモーターは次のように分類できます。 自己同期同期モーター、定期的なメンテナンスが必要なスパークノードは完全にオフになります。 コレクタ… コレクタの機能は電子機器によって引き継がれるため、製品全体の設計が大幅に簡素化され、よりコンパクトになります。
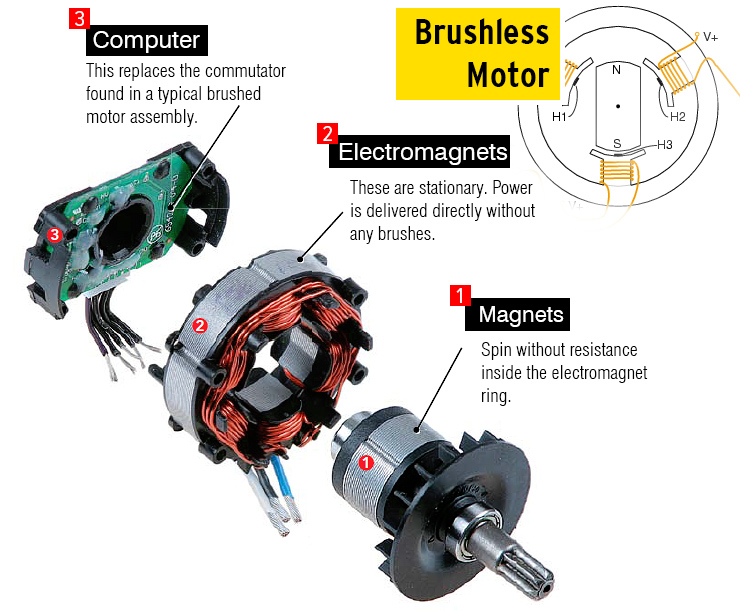
実際にはブラシは電子スイッチに置き換えられており、その損失は機械的なスイッチの場合よりもはるかに小さくなります。ローター上の強力なネオジム磁石により、シャフトのトルクが大きくなります。そして、そのようなエンジンは、コレクターの前任者よりも発熱が少なくなります。
その結果、エンジンの効率が最高となり、重量キログラムあたりの出力が向上し、ローター速度の調整範囲がかなり広くなり、電波干渉がほぼ完全に発生しなくなりました。構造的に、このタイプのエンジンは水中や過酷な環境での動作に容易に適合します。
電子制御ユニットはブラシレス DC モーターの非常に重要で高価な部品ですが、これを省略することはできません。この装置からエンジンは動力を受け取りますが、そのパラメータは同時にエンジンが負荷下で発生できる速度と出力の両方に影響します。
たとえ回転速度を調整する必要がない場合でも、電子制御ユニットは制御機能だけでなく電源コンポーネントも備えているため、必要になります。 ESC は次のものに似ていると言えます。 非同期ACモーター用周波数コントローラーブラシレス DC モーターへの電力供給と制御用に特別に設計されています。
BLDCモーター制御
BLDC モーターの制御方法を理解するために、まず整流子モーターがどのように動作するかを思い出してください。その核心 磁場中の電流によるフレームの回転原理.
電流が流れるフレームが回転して平衡位置に達するたびに、整流子 (コレクタに押し付けられたブラシ) がフレームを流れる電流の方向を変え、フレームは動作を続けます。このプロセスは、フレームがポールからポールへと移動するたびに繰り返されます。コレクタモータにのみそのようなフレームが多数あり、磁極のペアが数組あります。そのため、ブラシコレクタには2つの接点ではなく多くの接点が含まれています。
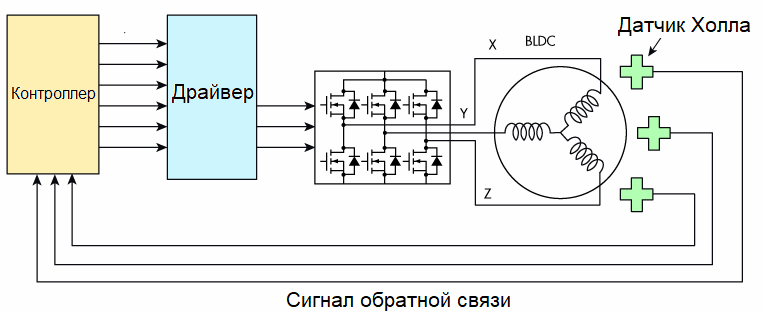
ECMも同様です。ローターが平衡位置から離れるとすぐに、磁場の極性が反転します。制御電圧のみがローターには供給されず、ステーター巻線に供給されます。これは、適切なタイミング (ローター位相) で半導体スイッチの助けを借りて行われます。
ブラシレス モーターの固定子巻線への電流は、正しい時間、つまりローターが特定の既知の位置にあるときに供給される必要があることは明らかです。これを行うには、次のいずれかの方法を使用します。1 つ目はローター位置センサーに基づいており、2 つ目は現在電力を受け取っていないコイルの 1 つの EMF を測定することによって行われます。
センサーには磁気センサーと光学センサーがあり、最も一般的なのは磁気センサーです。 ホール効果… 2 番目の方法 (EMF 測定に基づく) は効果的ではありますが、低速時や始動時に正確な制御が可能ではありません。一方、ホール センサーは、すべてのモードでより正確な制御を提供します。三相 BLDC モーターには、このようなセンサーが 3 つあります。
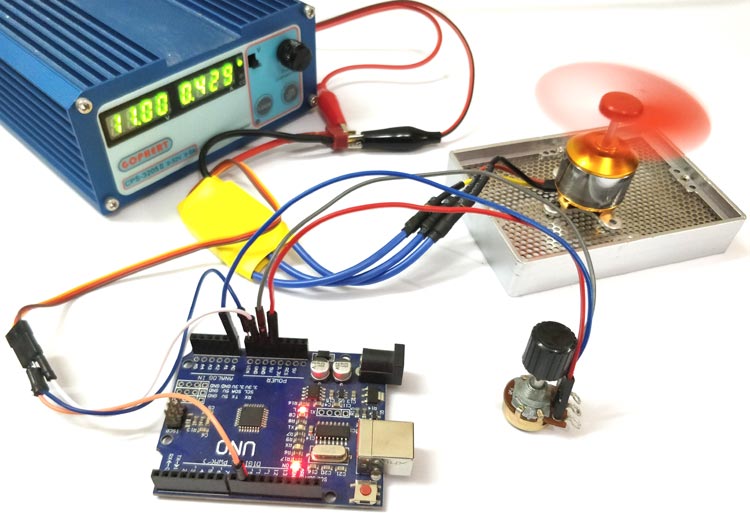
ローター位置センサーのないモーターは、モーターが軸負荷 (ファン、プロペラなど) なしで始動する場合に適用されます。負荷がかかっている状態で始動を行う場合は、ローター位置センサーを備えたモーターが必要です。どちらのオプションにも長所と短所があります。
センサーを使用したソリューションはより便利な制御になりますが、センサーの少なくとも 1 つが故障すると、エンジンを分解する必要があり、さらにセンサーには別の配線が必要になります。センサーレスバージョンでは特別なワイヤーは必要ありませんが、始動中にローターが前後に揺れます。これが許容できない場合は、システムにセンサーを取り付ける必要があります。
ローターとステーター、相数
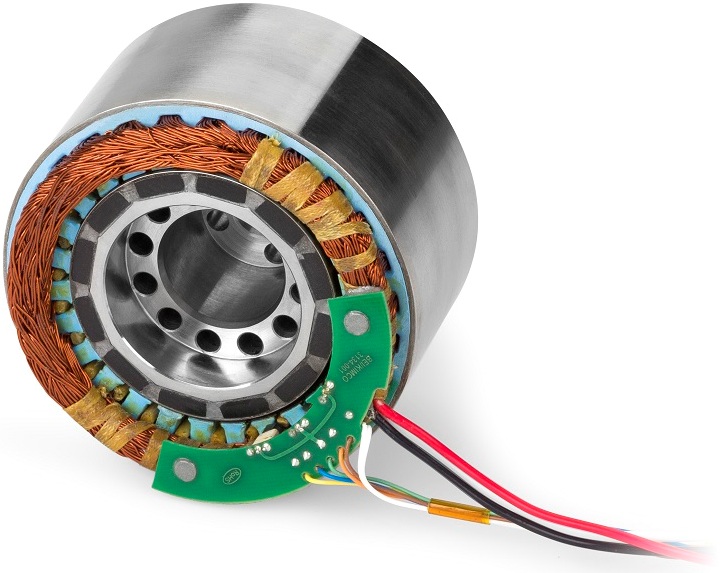
BLDC モーターのローターは外部または内部、ステーターはそれぞれ内部または外部にすることができます。ステーターは磁気伝導性の材料で作られており、歯の数は完全に相の数で割られています。ロータは、必ずしも磁気伝導性材料で作られる必要はなく、必ず磁石がしっかりと取り付けられて作られてもよい。

磁石が強力であればあるほど、利用できるトルクは大きくなります。ステーターの歯の数は、ローターの磁石の数と同じであってはなりません。歯の最小数は制御フェーズの数と同じです。
最新のブラシレス DC モーターのほとんどは、設計と制御を簡素化するために三相になっています。 AC 誘導モーターと同様に、ここでは 3 相の巻線が「デルタ」または「スター」によってステーターに接続されています。
ローター位置センサーのないモーターには 3 本の電源線があり、センサー付きモーターには 8 本のワイヤーがあります。追加の 2 本のワイヤーはセンサーへの電力供給用で、3 本のワイヤーはセンサーの信号出力用です。
低速外部回転子モーターは、制御電流の周波数より大幅に低い角周波数で回転を得るために、1 相あたり多数の極 (したがって歯) で作られています。ただし、高速三相モーターであっても、歯数が 9 未満のものは通常使用されません。