サイリスタ電圧調整器
 サイリスタ電圧レギュレータは、電気モーターの速度とトルクを制御するように設計されたデバイスです。速度とトルクの調整は、モーターのステーターに供給される電圧を変更することによって実行され、サイリスターの開き角を変更することによって実行されます。このモータ制御方法を位相制御といいます。この方法はパラメトリック(振幅)制御の一種です。
サイリスタ電圧レギュレータは、電気モーターの速度とトルクを制御するように設計されたデバイスです。速度とトルクの調整は、モーターのステーターに供給される電圧を変更することによって実行され、サイリスターの開き角を変更することによって実行されます。このモータ制御方法を位相制御といいます。この方法はパラメトリック(振幅)制御の一種です。
サイリスタ電圧レギュレータは、クローズド制御システムとオープン制御システムの両方で実装できます。オープンループレギュレータは満足のいく速度制御性能を提供しません。その主な目的は、動的プロセスにおいてドライブの望ましい動作モードを得るためにトルクを調整することです。
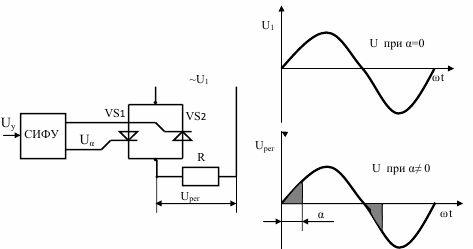
サイリスタ電圧レギュレータの簡略化されたスキーム
単相サイリスタ電圧レギュレータの電源セクションには、正弦波入力電圧で負荷に双方向の電流が確実に流れるようにする 2 つの制御されたサイリスタが含まれています。
閉ループ サイリスタ コントローラは、原則として負の速度フィードバックとともに使用され、これにより、低速回転速度の領域でドライブの十分に剛性の高い機械的特性を持つことが可能になります。
速度とトルクの制御にサイリスタ レギュレータを最も効果的に使用する 非同期ローターモーター.
サイリスタレギュレータの電源回路
図では。図1、a〜eは、レギュレータの整流素子を1相に含めるための可能な方式を示している。それらの中で最も一般的なのは図の図です。 1、a.固定子巻線のあらゆる接続方式に使用できます。連続電流モードでのこの回路の負荷に流れる許容電流 (rms 値) は次のとおりです。

ここで、Azt はサイリスタを流れる電流の許容平均値です。
最大順方向および逆方向サイリスタ電圧

ここで、kzap — 回路内で起こり得るスイッチング過電圧を考慮して選択された安全率。 — ネットワークの線間電圧の実効値。
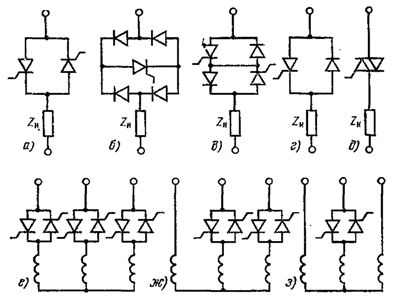
米。 1. サイリスタ電圧調整器の電源回路のスキーム。
図の図では、図1bでは、制御されていないダイオードのブリッジの対角線にサイリスタが1つだけ含まれている。この回路の負荷電流とサイリスタ電流の比率は次のとおりです。

制御されていないダイオードは、サイリスタの電流の半分になるように選択されます。サイリスタへの最大順電圧
サイリスタの逆電圧はゼロに近くなります。
図の図。 1b には図 1b のスキームといくつかの違いがあります。 1ですが、管理体制の構築についてです。図の図では、各サイリスタの制御パルスは電源の周波数に従う必要があります。図の図では、図1bでは、制御パルスの周波数は2倍である。
図の図。可能であれば、2 つのサイリスタと 2 つのダイオードで構成される図 1、c のサイリスタの制御、負荷、電流、および最大順方向電圧は図の図と同様になります。 1、a.
ダイオードの分路作用によるこの回路の逆電圧はゼロに近くなります。
図の図。サイリスタの電流と最大順方向電圧および逆方向電圧という点では、図1dの回路と同様です。 1、a.図の図。図 1 の回路では、d は、サイリスタ制御角度の必要な変動範囲を提供する制御システムの考慮された要件とは異なります。 1、a-c、関係
ここで、φ - 負荷の位相角。
図の回路の場合、 1、d、同様の比率は次の形式になります。
角度変更の範囲を広げる必要があるため複雑になる サイリスタ制御システム…図の図。図 1 に示すように、d は固定子巻線が中性線なしでスター型に接続され、線路導体に整流器が含まれるデルタ型に接続されている場合に適用できます。このスキームの範囲は、逆接点を備えた不可逆および可逆電気ドライブに限定されます。
図の図。 4-1、そのプロパティの e は図のスキームと似ています。 1、a.ここでのトライアック電流は負荷電流に等しく、制御パルスの周波数は電源電圧の周波数の 2 倍に等しくなります。トライアック回路の欠点は、許容値du / dtおよびdi / dtである従来のサイリスタの欠点よりもはるかに小さいです。
サイリスタ レギュレータの場合、最も合理的なスキームは図 2 にあります。ただし、2 つの逆並列接続されたサイリスタを備えています。
レギュレータの電源回路は、図に示すように、モータの 2 相と 1 相の 3 相すべて (対称三相回路) に逆並列サイリスタを使用して実装されています。それぞれ1、f、g、h。
クレーンの電気駆動装置で使用されるレギュレータで最も普及しているのは、図に示す対称スイッチング回路です。これは、高調波電流による損失が最も低いことが特徴です。 4 個および 2 個のサイリスタを備えた回路での損失が大きくなるのは、モーターの相の電圧の不均衡によって決まります。
PCTシリーズ サイリスタレギュレータの基本技術データ
PCT シリーズのサイリスタ レギュレータは、巻線ロータを備えた誘導電動機のステータに供給される電圧を (所定の法則に従って) 変更するためのデバイスです。 PCTシリーズのサイリスタコントローラは、対称三相スイッチング回路に従って作られています(図1、e)。クレーン電気ドライブで指定されたシリーズのレギュレータを使用すると、10:1 の範囲で回転周波数を調整したり、始動時と停止時のダイナミック モードでエンジン トルクを調整したりできます。
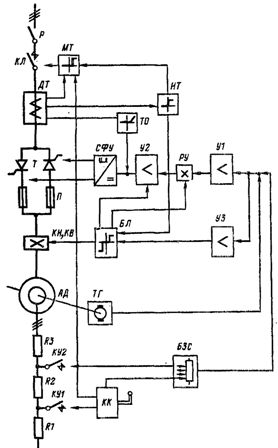
PCT シリーズのサイリスタ レギュレータは、100、160、320 A (最大電流はそれぞれ 200、320、640 A) の連続電流と 220、380 V AC の電圧向けに設計されています。このレギュレータは、共通のフレーム上に組み立てられた 3 つの電源ユニット (逆並列接続されたサイリスタの相数に応じて)、電流センサー ユニット、および自動化ユニットで構成されます。電源には、押出アルミニウムプロファイルクーラーを備えたタブレットサイリスタが使用されています。当然空冷です。自動化ブロックは、レギュレーターのすべてのバージョンで同じです。
サイリスタ レギュレータは IP00 の保護等級で製造されており、TA および TCA シリーズ コントローラと設計が似ている標準的な TTZ タイプの磁気コントローラ フレームに取り付けることを目的としています。 PCT シリーズレギュレータの全体寸法と重量を表に示します。 1.
表1 PCTシリーズボルテージレギュレータの全体寸法と重量

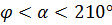
TTZ 磁気コントローラには、モータを逆転させるための方向性コンタクタ、ローター回路のコンタクタ、およびコントローラとサイリスタ レギュレータを通信する電気ドライブのその他のリレー接点要素が装備されています。レギュレータ制御システムの構造構造は、図に示す電気ドライブの機能図から見ることができます。 2.
三相対称サイリスタ ブロック T は、SFU 位相制御システムによって制御されます。レギュレータ内のコントローラ KK を使用して、BZS の速度設定が変更され、ブロック BZS を介して、時間の関数として、ローター回路内のアクセル KU2 が制御されます。基準信号と TG タコジェネレータの差は、アンプ U1 と UZ によって増幅されます。ロジック リレー デバイスがアンプ UZ の出力に接続されており、2 つの安定状態があります。1 つは順方向コンタクタのスイッチオンに対応します。 KB、2番目 - 順方向コンタクタの逆方向KNのスイッチング。
論理デバイスの状態が変化すると同時に、開閉装置の制御回路内の信号が反転します。整合アンプ U2 からの信号は、電流制限ブロック TO から来て SFU の入力に供給されるモーター固定子電流遅延フィードバック信号と加算されます。
論理ブロック BL は、電流センサー DT および電流存在モジュール NT からの信号にも影響を受け、通電中の方向性接触器のスイッチングが禁止されます。 BL ユニットは、速度安定化システムの非線形補正も実行し、ドライブの安定性を確保します。レギュレータは昇降機構や走行機構の電気駆動装置に使用できます。
PCT シリーズレギュレータは電流制限システムを採用しています。サイリスタを過負荷から保護し、ダイナミックモードでモータートルクを制限するための電流制限のレベルは、レギュレータの定格電流の0.65から1.5まで滑らかに変化し、過電流から保護するための電流制限のレベルは0.9から0.9までです。レギュレーターの定格電流は2.0です。幅広い保護設定により、出力が約 2 倍異なるモーターを使用した同じ標準サイズのレギュレータの動作が可能になります。
米。 2. PCT タイプのサイリスタ レギュレータを備えた電気ドライブの機能図: KK — コマンド コントローラー。 TG — タコジェネレーター; KN、KB — 方向性接触器。 BZS — 速度設定ブロック。 BL — ロジックブロック。 U1、U2。米国 - アンプ。 SFU — 位相制御システム。 DT — 電流センサー。 IT — 現在の存在単位。 TO — 電流制限ユニット。 MT — 保護ユニット。 KU1、KU2 — 加速接触器。 KL — リニアコンタクタ: R — サーキットブレーカー。
米。 3. サイリスタ電圧調整器 PCT
電流存在システムの感度は、同相で 5 ~ 10 Arms 電流です。このレギュレータは、ゼロ、スイッチング過電圧、少なくとも 1 つの相 (ブロック IT および MT) での電流損失、無線受信の干渉からの保護も提供します。PNB 5M タイプの高速ヒューズは、短絡電流に対する保護を提供します。