エネルギー節約手段としての可変電気駆動装置
 規制されていない電気駆動から規制された電気駆動への移行は、電気駆動および電気駆動による技術分野でエネルギーを節約する主な方法の 1 つです。
規制されていない電気駆動から規制された電気駆動への移行は、電気駆動および電気駆動による技術分野でエネルギーを節約する主な方法の 1 つです。
一般に、生産機構の電気駆動装置の速度またはトルクを制御する必要性は、技術プロセスの要件によって決まります。たとえば、旋盤でのワーク加工の清浄度はカッターの送り速度によって決まり、停止する前にかごを正確に位置決めするにはエレベータ速度の減速が必要であり、巻き取りシャフトのトルクを調整する必要性は次のような条件によって決まります。傷ついた材料の張力を一定に維持するための条件など。
ただし、技術的条件に応じて速度を変更する必要のない機構や、技術的プロセスのパラメータに影響を与える他の (非電気的) 方法が調整に使用される機構が多数あります。
まず第一に、固体、液体、気体の製品を移動させるための連続輸送機構 (コンベア、ファン、ファン、ポンプ ユニット) が含まれています。これらの機構には、現在、原則として、機構の負荷に関係なく、作動体を一定の速度で動作させる、規制されていない非同期電気駆動装置が使用されています。部分負荷の下では、一定速度での動作モードの特徴は、 比エネルギー消費量 公称モードとの比較。
NSC のパフォーマンスが低下すると、消費電力の相対的な割合がアイドル モーメントを上回るため、コンベアの効率が低下します。より経済的なのは可変速度モードで、同じパフォーマンスを提供しますが、引っ張る力の成分は一定です。
図では。図 1 は、負荷の移動速度が一定 (v — const) および調整可能 (Fg = const) の場合の、アイドル モーメント Mx = 0、ЗМв のコンベアのモーター シャフトの出力依存性を示しています。図中の斜線部分は速度制御による省エネ量を表します。
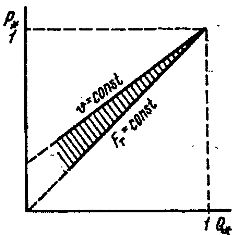
米。 1. 電動モーターシャフトの出力とコンベアの性能の依存性
したがって、コンベア速度が公称値の 60% に低下すると、モーターのシャフト出力は公称値と比較して 10% 減少します。速度調整の効果は、アイドルトルクが大きいほど大きくなり、コンベヤの性能を著しく低下させます。
積載量が少ない状態で連続輸送機構の速度を下げると、より低いエネルギー消費量で必要な作業量を実行できるようになります。つまり、製品を移動する技術プロセスにおけるエネルギー消費量を削減するという純粋に経済的な問題を解決できます。
通常、そのようなメカニズムの速度が低下すると、技術機器の動作特性の改善による経済効果も現れます。したがって、速度が低下すると、コンベヤ本体の摩耗が減少し、液体やガスを供給する機械によって発生する圧力の低下によりパイプラインや継手の耐用年数が長くなり、これらの製品の過剰な消費もなくなります。
テクノロジーの分野における効果は、エネルギー節約による効果よりも大幅に大きいことが判明することがよくあります。そのため、エネルギーの側面のみを評価して、そのようなメカニズムに制御された電気駆動装置を使用することの適否を決定するのは根本的に間違っています。
ショベルマシンの速度制御。
液体と気体を供給する遠心機構(ファン、ポンプ、ファン、コンプレッサー)は、エネルギー固有消費量を大幅に削減できる可能性が全国的に最も高い主要な一般産業機構です。遠心機構の特別な位置は、その巨大さ、高出力、通常は長時間の動作モードによって説明されます。
これらの状況は、国のエネルギーバランスにおけるこれらのメカニズムの重要な割合を決定します。ポンプ、ファン、コンプレッサーの駆動モーターの合計設置容量は、すべての発電所の容量の約 20% であり、ファンだけで国内で生産される全電力の約 10% を消費します。
遠心機構の動作特性は、流量 Q に対するヘッド H の依存性、および流量 Q に対する出力 P の依存性の形で表されます。定常動作モードでは、遠心機構によって生成されるヘッドは、次の条件によってバランスがとれています。液体または気体を配送する流体力学ネットワークまたは空気力学ネットワークの圧力。
ポンプの場合、圧力の静的成分は、ユーザーとポンプのレベル間の測地線の差によって決まります。ファンにとっては自然な魅力。ファンとコンプレッサーの場合 - ネットワーク (リザーバー) 内の圧縮ガス圧力から。
ポンプとネットワークの Q-H 特性の交点によって、パラメータ H-Hn および Q_Qn が決まります。一定速度で動作するポンプの流量 Q の調整は、通常、出口のバルブによって行われ、ネットワークの特性が変化します。その結果、流量 QA * <1 が対応します。ポンプの特性との交点。
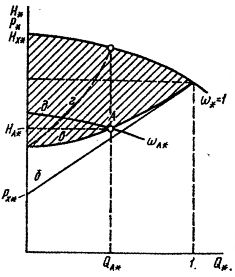
米。 2. ポンプユニットのQ-H特性
電気回路に例えると、バルブを通る流れを調整することは、回路の電気抵抗を増加させて電流を制御することに似ています。明らかに、この制御方法は、調整要素 (抵抗器、バルブ) での非生産的なエネルギー損失を伴うため、エネルギーの観点からは効率的ではありません。バルブ損失は、図の斜線部分で特徴付けられます。 1.
電気回路と同様、エネルギー源をユーザーよりも制御する方が経済的です。この場合、電源電圧の低下により電気回路の負荷電流が減少します。油圧および空力ネットワークでは、機構によって生成される圧力を下げることによって同様の効果が得られます。これは、インペラの速度を下げることによって実現されます。
速度が変化すると、遠心機構の動作特性は次のような相似の法則に従って変化します。Q * = ω *、H * = ω *2、P * = ω *3
その特性が点 A を通過するポンプ羽根車の速度:
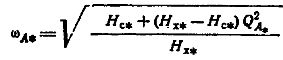
速度調整中にポンプが消費する電力の式は次のとおりです。

自然推力によって決まるヘッドの静的成分は Hx よりも大幅に小さいため、速度に対するモーメントの 2 次依存性は主にファンに特徴的です。技術文献では、遠心機構の次の特性を考慮した、モーメントの速度に対するおおよその依存性が使用されることがあります。
M* = ω *n
ここで、Hc = 0およびnHc> 0の場合、n = 2です。計算と実験では、n = 2〜5が示されており、その大きな値は、背圧が大きいネットワークで動作するコンプレッサーの特徴です。
定速および可変速度でのポンプ動作モードの分析により、ω= const での過剰エネルギー消費が非常に重要であることが判明しました。たとえば、パラメータを使用したポンプの動作モードの計算結果を以下に示します。Hx * = 1.2;バック プレッシャーが異なるネットワーク上の Px*= 0.3 Зс:
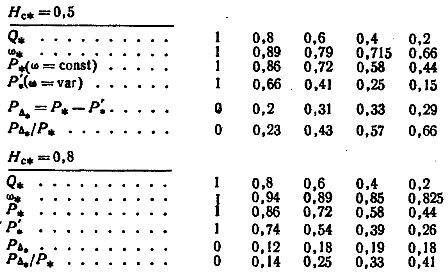
与えられたデータは、制御された電気駆動装置が消費電力の消費を大幅に削減できることを示しています。最初のケースでは最大 66%、2 番目のケースでは最大 41% です。実際には、さまざまな理由(バルブの欠如または故障、手動作動)によりバルブによる調整がまったく適用されないため、この効果はさらに大きくなる可能性があり、これは電力消費量の増加だけでなく、油圧ネットワークにおける過剰な労力とコストがかかります。
パラメータが一定のネットワークにおける単動遠心機構のエネルギー問題については上で説明しました。実際には、遠心機構が並行して動作し、ネットワークには可変パラメータが含まれることがよくあります。たとえば、採掘ネットワークの空気力学的抵抗は壁の長さの変化に応じて変化し、給水ネットワークの流体力学的抵抗は、日中に変化する水の消費モードによって決まります。
遠心機構を並行して動作させると、次の 2 つのケースが考えられます。
1) すべての機構の速度が同時に同期して調整されます。
2) 1 つの機構または機構の一部の速度が規制されている。
ネットワークパラメータが一定である場合、最初のケースでは、すべてのメカニズムは、上記のすべての関係が有効である 1 つの同等なものと考えることができます。 2 番目のケースでは、機構の非調整部分の圧力は、背圧と同じように調整部分に影響を及ぼし、非常に重要です。そのため、ここでの電力の節約は公称電力の 10 ~ 15% を超えません。機械の。
ネットワークパラメータが可変であるため、遠心機構とネットワークの連携の解析が非常に複雑になります。この場合、制御された電気ドライブのエネルギー効率は、その境界がネットワークパラメータの限界値と遠心機構の速度に対応する領域の形で決定できます。
このトピックについては、以下も参照してください。 VLT AQUA ポンプユニット用駆動周波数コンバータ