電気オーブンの自動温度制御
 電気抵抗炉では、ほとんどの場合、最も単純なタイプの温度制御である 2 位置制御が使用されます。この制御システムでは、制御システムの実行要素であるコンタクターには、«オン» と «オフ» の 2 つの端位置のみがあります。 。
電気抵抗炉では、ほとんどの場合、最も単純なタイプの温度制御である 2 位置制御が使用されます。この制御システムでは、制御システムの実行要素であるコンタクターには、«オン» と «オフ» の 2 つの端位置のみがあります。 。
オン状態では、炉の出力が常に余裕を持って選択されるため、炉の温度が上昇し、対応する定常状態の温度は動作温度を大幅に超えます。電源を切ると、オーブンの温度は急激に下がります。
コントローラーと炉のシステムに動的遅延がない理想的なケースの場合、オン/オフ コントローラーの動作を図に示します。図1では、炉温度の時間依存性が上部に示され、対応する出力の変化が下部に示されている。
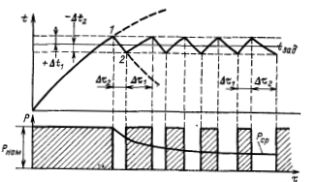
米。 1. 2 位置温度調整器の理想的な動作スキーム
炉が加熱されると、最初はその出力は一定で公称出力と等しいため、温度は値 Tbutt + Δt1 に達すると点 1 まで上昇します。この時点で、レギュレータが動作し、接触器が炉をオフにし、電力がゼロに下がります。その結果、炉の温度は曲線 1-2 に沿って減少し始め、不感帯の下限に達します。この時点で、炉が再びオンになり、温度が再び上昇し始めます。
したがって、2 つの位置の原理に従って炉の温度を調整するプロセスは、コントローラーのデッドゾーンによって決定される間隔 +Δt1、-Δt1 の設定値の周囲の鋸曲線に沿った温度の変化で構成されます。
炉の平均電力は、オン状態とオフ状態の時間間隔の比率に依存します。炉が加熱されて充電されると、炉の加熱曲線はより急峻になり、炉の冷却曲線はより平坦になるため、サイクル期間比が減少し、したがって平均電力 Pav も低下します。
2 位置制御により、オーブンの平均出力は常に一定の温度を維持するために必要な出力に調整されます。最新のサーモスタットのデッド ゾーンは非常に小さく、0.1 ~ 0.2 °C にすることができます。ただし、コントローラーと炉のシステムにおける動的遅延により、炉温度の実際の変動は何倍も大きくなる可能性があります。
この遅延の主な原因は、特にセラミックと金属の 2 つの保護シェルが装備されている場合、熱電対センサーの慣性です。この遅延が大きいほど、ヒーターの温度変動がコントローラーの不感帯を超えます。さらに、これらの振動の振幅は炉の過剰出力に大きく依存します。炉のスイッチング電力が平均電力を超えるほど、これらの変動は大きくなります。
最新の自動ポテンショメータの感度は非常に高く、あらゆる要件を満たすことができます。逆にセンサーの慣性は大きいです。したがって、保護カバー付きの磁器チップ内の標準的な熱電対の遅延は約 20 ~ 60 秒であるため、温度変動が許容できない場合は、保護されていないオープンエンド熱電対がセンサーとして使用されます。ただし、これはセンサーの機械的損傷の可能性や、デバイス内の熱電対を通る漏れ電流により誤動作を引き起こす可能性があるため、常に可能であるとは限りません。
炉のオンとオフを切り替えるのではなく、ある電力段から別の電力段に切り替える場合、予備電力を削減することができます。また、高い段は炉が消費する電力よりわずかに多くなければなりません。低い - それほどでもない。この場合、炉の加熱および冷却曲線は非常に平坦になり、温度は装置のデッドゾーンをほとんど超えることはありません。
ある出力段から別の出力段へのこのような切り替えを行うには、炉の出力をスムーズにまたは段階的に調整できる必要があります。このような規制は次の方法で実行できます。
1) 炉ヒーターを、たとえば、«Triangle» から «Star» に切り替えます。このような非常に大まかな規制は温度均一性の違反に関連しており、家庭用電熱器具でのみ使用されます。
2) 調整可能な有効抵抗または無効抵抗を備えた炉との直列接続。この方法は、非常に大きなエネルギー損失や設備の力率の低下を伴います。
3) さまざまな電圧レベルで炉を切り替える調整変圧器または単巻変圧器を介して炉に電力を供給します。ここでも、供給電圧が調整され、炉の電力はこの電圧の二乗に比例するため、調整も段階的かつ比較的粗くなります。さらに、(変圧器内で)追加の損失が発生し、力率が低下します。
4) 半導体素子による位相制御。この場合、炉はサイリスタによって電力を供給され、そのスイッチング角度は制御システムによって変更されます。このようにして、比例、積分、比例積分などの連続制御方法を使用して、追加の損失をほとんど発生させることなく、広範囲にわたって炉出力をスムーズに制御することができます。これらの方法によれば、各瞬間において、炉によって吸収される電力と炉内で放出される電力との間の対応関係が満たされなければならない。
電気オーブンの温度制御方法の中で最も効果的なのは、サイリスタ レギュレータによるパルス制御です。
炉電力のパルス制御過程を図に示します。 2. サイリスタの動作周波数は、電気抵抗炉の熱慣性に応じて選択されます。
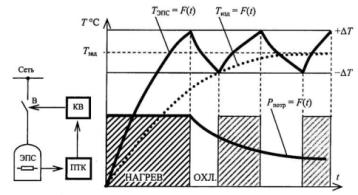
米。 2.サイリスタパルス温度調節器 電気抵抗炉
心拍数の調整には主に 3 つの方法があります。
— スイッチング周波数でのパルス制御 — サイリスタの点火の瞬間の変化を伴う ek = 2ev (ek は供給ネットワーク電流の周波数) は、位相パルスまたは位相と呼ばれます (曲線 1)。
— スイッチング周波数を高めたパルス調整が可能
— スイッチング周波数を低減したパルス制御 (曲線 3)。
パルス制御により、追加の損失を発生させずに広範囲にわたってスムーズな電力制御を実現することができ、消費される炉とネットワークからの電力供給に確実に準拠します。
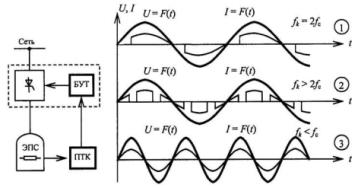
米。 3. 連続温度調節器の接続図
回路の主な要素: BT - 炉の各相で 2 つ並列に接続された 6 つのサイリスタで構成されるサイリスタ ブロック、BUT - サイリスタ制御ブロック、サイリスタ制御電極への信号を生成、PTC - 熱制御デバイス、温度センサーからの信号、NO の不一致を処理して出力、PE — ポテンショメータ要素、DT 信号に応じて機械式トランスミッションを備えた ED によって移動するスライダーを備えています。DT — 温度センサー (熱電対)、ISN — 安定化 DC 電圧源、 KL — リニアコンタクタ、VA1、VA2 — 回路を短絡から保護する自動スイッチ。