電動モーターの動作原理と装置
電気モーターは、電気を消費することで機械的仕事を行うように設計されており、通常は回転運動に変換されます。テクノロジーの中には、作業体の並進運動を即座に作成するモデルがありますが。これらはリニアモーターと呼ばれます。
産業設備では、電気モーターは、技術的な生産プロセスに関与するさまざまな金属切断機や機械装置を駆動します。
家庭用電化製品の内部では、洗濯機、掃除機、コンピュータ、ヘアドライヤー、子供のおもちゃ、時計、その他多くの機器が電気モーターによって動作します。

基本的な物理プロセスと動作原理
屋内に移動するとき 磁場 電流と呼ばれる電荷には常に、磁力線の向きに垂直な面内で方向を偏らせる傾向のある機械的な力が作用します。金属ワイヤまたは金属ワイヤで作られたコイルに電流が流れると、この力によって、通電している各ワイヤおよびコイル全体が移動/回転しようとします。
下の写真は、電流が流れている金属フレームを示しています。磁場が適用されると、フレームの各枝に力 F が発生し、回転運動が生じます。

閉導ループ内での起電力の生成に基づく電気エネルギーと磁気エネルギーの相互作用のこの特性は、すべての電気モーターで機能します。その設計には次のものが含まれます。
-
電流が流れるコイル。特殊なアンカーコア上に配置され、回転ベアリングに固定され、摩擦力への抵抗が軽減されます。この設計はローターと呼ばれます。
-
固定子は磁場を生成し、その磁力線が回転子巻線の巻線に沿って流れる電荷を貫通します。
-
ステータを配置するハウジング。ボディ内部には特別なシートが作られ、その中にローターベアリングの外側ケージが取り付けられています。
最も単純な電気モーターの簡略化された設計は、次の形式の図で表すことができます。

ローターが回転するとトルクが生成され、その出力はデバイスの一般的な設計、適用される電気エネルギーの量、および変換中の損失によって決まります。
モーターの最大可能トルクの大きさは、モーターに加えられる電気エネルギーよりも常に小さくなります。効率値が特徴です。
電動モーターの種類
コイルに流れる電流の種類に応じて、DCモーターとACモーターに分けられます。これら 2 つのグループにはそれぞれ、異なる技術プロセスを使用した多数の修正が行われています。
DCモーター
固定子によって生成される固定子磁場があります。 永久磁石 または励磁コイルを備えた特殊な電磁石。アーマチュア コイルはシャフトにしっかりと取り付けられており、シャフトはベアリングに固定されており、自身の軸の周りを自由に回転できます。
このようなエンジンの基本構造を図に示します。

強磁性材料で作られたアーマチュアのコアには、2 つの直列接続された部分からなるコイルがあり、一端で導電性コレクタ プレートに接続され、他端で相互に接続されます。 2 つのグラファイト ブラシがアーマチュアの正反対の端に配置され、コレクタ プレートの接触パッドに押し付けられます。
正の DC 電源電位が下部のパターン ブラシに適用され、負の電位が上部のパターン ブラシに適用されます。コイルを流れる電流の方向は、赤い破線の矢印で示されています。
電流により、磁界はアーマチュアの左下に N 極、アーマチュアの右上に S 極が生じます (ジンバルの法則)。これにより、ローターの磁極が同じ名前の固定された磁極から反発し、ステーターの反対側の磁極に引き付けられます。加えられた力の結果、回転運動が発生します。その方向は茶色の矢印で示されています。
慣性によってアーマチュアがさらに回転すると、磁極は他の集電板に移動します。それらの電流の方向は逆になります。ローターはさらに回転を続けます。
このようなコレクタデバイスの単純な設計は、電気エネルギーの大きな損失につながります。このようなモーターは、シンプルなデザインのデバイスや子供向けのおもちゃで動作します。
生産プロセスに関与する直流電気モーターは、より複雑な設計になっています。
-
コイルは 2 つに分割されるのではなく、いくつかの部分に分割されます。
-
コイルの各セクションは独自のポールに取り付けられます。
-
コレクタデバイスは、巻線の数に応じて特定の数の接触パッドで作られます。
その結果、接触プレートを介して各極がブラシおよび電流源にスムーズに接続され、エネルギー損失が減少します。
そのようなアンカーの装置が写真に示されています。
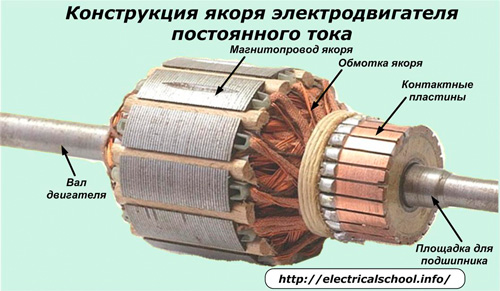
DC モーターでは、ローターの回転方向を逆にすることができます。これを行うには、ソースの極性を変更して、コイル内の電流の動きを反対に変更するだけで十分です。
ACモーター
これらは、コイルに流れる電流が次のように表されるという点で以前の設計とは異なります。 正弦波調和則定期的に方向(符号)を変えます。電力を供給するには、符号が交互になる発電機から電圧が供給されます。
このようなモーターのステーターは磁気回路によって機能します。これは、コイルのターンがフレーム (コイル) 構成で配置される溝のある強磁性プレートで作られています。

同期電動機
下の写真は、ローターとステーターの電磁界が同期回転する単相 AC モーターの動作原理を示しています。

固定子の磁気回路の直径方向両端の溝には巻線が配置されており、交流電流が流れる枠の形で模式的に示されている。
半波の正の部分の通過に対応する瞬間の場合を考えてみましょう。
軸受セル内では、永久磁石を内蔵したローターが自由に回転し、磁極の北側の「N口」と南側の「S口」が明確に区別されます。電流の正の半波が固定子巻線を流れると、その中に«S st» および«N st» 極を持つ磁場が生成されます。
ローターとステーターの磁場の間に相互作用力が発生し (極は反発し、極は引き合う)、反対の極が互いにできるだけ近くに配置されている場合、モーターのアーマチュアを任意の位置から極端に回転させる傾向があります。別。
同じケースを考えてみますが、その逆、つまり電流の負の半波がフレーム ワイヤを通過する瞬間について考えてみると、アーマチュアの回転は反対方向に発生します。
ステーター内でのローターの継続的な動きを保証するために、それぞれが別個の電流源によって電力を供給されることを考慮して、1 つの巻線フレームではなく、一定の数の巻線フレームが作成されます。
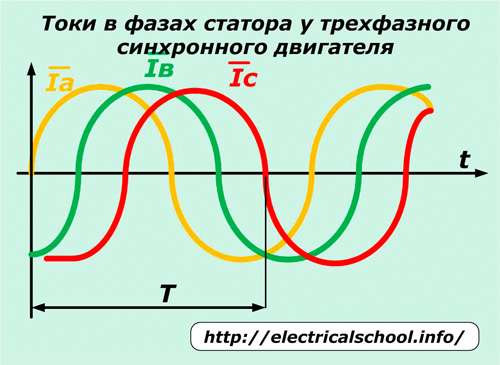
同期回転を行う三相 AC モーターの動作原理、ローターとステーターの電磁界を次の図に示します。

この設計では、3 つのコイル A、B、C がステーター磁気回路内に、互いに 120 度の角度でオフセットして取り付けられています。コイル A は黄色、B は緑色、C は赤色でマークされています。各コイルは前のケースと同じフレームで作成されます。
この図では、いずれの場合も、電流は 1 つのコイルのみを順方向または逆方向に流れます。これは、«+» および «-« の記号で示されています。
正の半波が位相 A を順方向に通過すると、固定子の磁極がこの平面内に形成され、可動電機子を引き付けるため、回転子の磁界の軸は水平位置になります。ローターの反対の極はステーターの極に近づく傾向があります。
正の半波が C 相に入ると、アーマチュアは時計回りに 60 度回転します。電流が B 相に印加されると、同様のアーマチュアの回転が発生します。次の巻線の次の相に電流が流れると、ローターが回転します。
120 度の角度でシフトされた三相主電源電圧が各巻線に印加されると、交流電流が巻線内を循環し、アーマチュアを回転させ、印加された電磁場と同期回転を引き起こします。
同じ機械設計が三相ステッピング モーターでもうまく使用されています…制御により各巻線のみで使用されています 専用コントローラー(ステッピングモータードライバー) 一定のパルスは、上記のアルゴリズムに従って適用および除去されます。
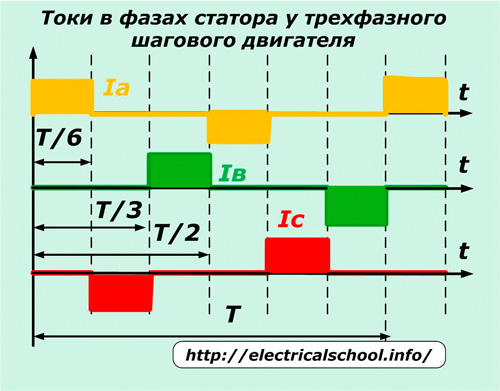
始動により回転運動が開始され、特定の時点での停止によりシャフトの回転が測定され、プログラムされた角度で停止して特定の技術的操作が実行されます。
説明したどちらの三相システムでも、アーマチュアの回転方向を変更することが可能です。これを行うには、フェーズ «A» — «B» — «C» のシーケンスを別のフェーズ (たとえば、«A» — «C» — «B») に変更するだけです。
ローターの速度は周期 T の長さによって制御されます。周期が減少すると回転が加速します。相内の電流の振幅の大きさは、巻線の内部抵抗と巻線に印加される電圧の値によって決まります。電気モーターのトルクと出力の量を決定します。
非同期モーター
これらのモーター設計には、前述の単相および三相モデルと同じ巻線を備えたステーター磁気回路が備えられています。その名前は、アーマチュアとステータの電磁場の非同期回転に由来しています。これは、ローターの構成を改良することによって実現されます。
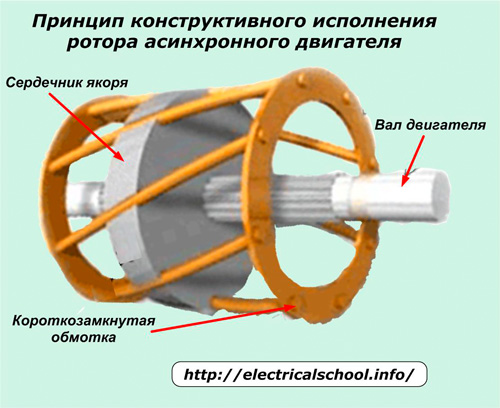
コアは溝付き電磁鋼板でできています。これらにはアルミニウムまたは銅の電流導体が装備されており、アーマチュアの端が導電性リングで閉じられています。
固定子巻線に電圧が印加されると、起電力により回転子巻線に電流が誘導され、電機子磁界が発生します。これらの電磁場が相互作用すると、モーターのシャフトが回転し始めます。
この設計では、ローターの移動はステーター内に回転電磁場が発生した後にのみ可能になり、ステーターとの非同期動作モードが継続されます。
非同期モーターは設計がシンプルなため、安価であり、産業用設備や家電製品に広く使用されています。

ABB防爆電動モーター
リニアモーター
産業機械の多くの作動体は、金属加工機械、車両、杭打ち時のハンマー打撃などの操作に必要な、同一平面内での往復運動または並進運動を実行します。
このような作動体を、ギアボックス、ボールネジ、ベルトドライブ、および回転電気モーターからの類似の機械装置を用いて移動させると、設計が複雑になる。この問題に対する最新の技術的解決策は、リニア電気モーターの動作です。
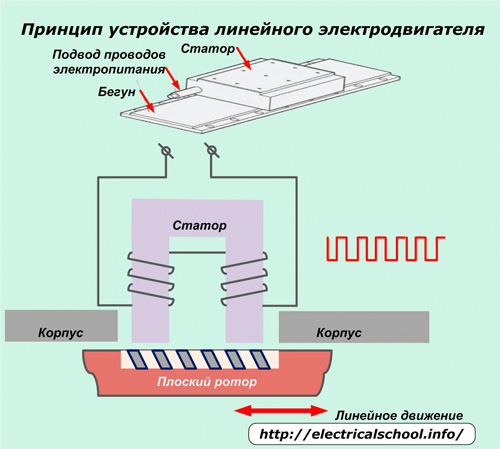
その固定子と回転子は、回転電気モーターのようにリング状に巻かれるのではなく、ストリップの形で細長くなります。
動作原理は、一定の長さの開磁気回路を備えた固定ステーターからの電磁エネルギーの伝達により、ランナーローターに往復直線運動を与えることです。電流を順次オンにすることで、内部に作動磁場が生成されます。
集電装置により電機子巻線に作用します。このようなモータで生じる力は、ロータをガイド要素に沿って直線方向にのみ移動させます。
リニア モーターは、直流または交流で動作するように設計されており、同期モードまたは非同期モードで動作できます。
リニアモーターの欠点は次のとおりです。
-
テクノロジーの複雑さ。
-
高価;
-
エネルギー効率が低い。